
Professor Arash Arami uses machine learning and system identification techniques to uncover the neural control of human movements and to design optimal controllers and AI for assistive robotic systems such as exoskeletons.
Profiles
Filter by:

Alexander Aroyo is the Manager of the Social and Intelligent Robotics Research Lab. His research focuses on endowing robots with the capability of complex social interactions with humans.

Marie Charbonneau is a post-doctoral fellow in the Human-Centred Robotics and Machine Intelligence Lab. Her research focuses on reliable whole-body control for humanoid robots.
David Correa
Assistant Professor
Professor David Correa is an expert in bio-inspired architecture, including bio-materials, 4-D printing, material structures, adaptive and self-forming systems, and advanced robotic fabrication.

Professor Kerstin Dautenhahn is the Canada 150 Research Chair in Intelligent Robotics and has pioneered research in social robotics, human-robot interaction and assistive robotics.

Professor Brandon DeHart is the RoboHub Manager. He has been working with mobile and legged robots for almost 20 years, with a research focus on balance and gait for bipedal robots.

Professor Baris Fidan is an expert on system identification and adaptive control for multi-agent systems, mechatronics, control, and planning.

Professor Moojan Ghafurian is an expert on human-computer interaction and how it relates to assistive technology used in the care of older adults.

Professor Ehsan Hashemi is the Director of the NODE Lab research group at the University of Alberta and an expert on autonomous navigation, distributed controls, and assistive robotics.
Professor Yue Hu specializes in human-robot interactions and humanoid robotics, focusing on understanding different aspects of humans when physically interacting with a robot.
Professor Soo Jeon is a member of the Automation & Controls group in Mechanical & Mechatronics Engineering. His research lies in the area of design and control of mechatronic systems.

Professor Behrad Khamesee has pioneered research in microrobotics and magnetic levitation which has received international attention.

Professor Dana Kulić is the Director of the Robotics research group at Monash University and is an expert in humanoid robotics, human-robot interaction and intelligent systems.
Professor Edith Law focuses on how people can enhance and make sense of intelligent systems, such as robots and other human-in-the-loop systems, including issues related to transparency, engagement, trust and collaboration.
Jonathan Lin is a post-doctoral fellow in the Human-Centred Robotics and Machine Intelligence Lab. His research focuses on the development of human motion capture and modelling, motion quantification, and applied physiotherapy.

Professor John McPhee is the Canada Research Chair in Biomechatronic System Dynamics. His team develops dynamic models, machine learning algorithms, and model-based controllers for human-machine systems.

Professor William Melek is the RoboHub Director, a University Research Chair, and leads the Laboratory of Computational Intelligence and Automation. He is an expert on robotics, artificial intelligence, sensing, and state estimation.

Professor Katja Mombaur is the Canada Excellence Research Chair in Human-Centred Robotics and Machine Intelligence. She is an expert on human-robot interaction, wearable and humanoid robots, and human motion analysis.
Chris Nielsen
Professor and Associate Chair, Grad Studies (ECE)
Professor Chris Nielsen is a leading authority on nonlinear control systems and the mathematical design of feedback control laws.

Professor Gennaro Notomista is the Varma Family Professor in Robotics, focused on the design and control of robotic systems for long-duration autonomy with applications to persistent environmental monitoring for climate change ecological studies.

Professor Yash Pant leads the Control, Learning and Logic (CL2) group, which focuses on decision-making for multi-agent and autonomous systems, finding applications for ground robots, human-robot interaction, and aerial robot swarms.

Professor Maya Przybylski is the O'Donovan Director of the School of Architecture, the Director of the DATALab, and an expert on the complex intersection of architectural design, data and computation.
Professor Oliver Schneider is an expert on haptics, haptic computing, and human-computer interaction. He is working on methods to facilitate the widescale deployment of haptic technology.

Professor Hamed Shahsavan is an expert on the development of soft and programmable materials and their applications in the design and fabrication of mobile soft robots, functional devices, and artificial biological organisms.
Professor Stephen L. Smith is the Canada Research Chair in Autonomous Systems and an expert in both robotic motion planning and the distributed control of autonomous systems.
James Tung
Assistant Professor
Professor James Tung focuses on the advancement of human movement research methods and development of assistive technology for independent mobility and rehabilitation.

Robert Wagner is the RoboHub's Technician and Safety Officer, having joined the team after working with MME as a CNC Technician for over 20 years.
Professor Steven Waslander is a leading authority on autonomous aerial and ground vehicles, simultaneous localization and mapping (SLAM), and multi-vehicle systems.

Alexander Werner is the RoboHub's Humanoid Specialist and a PhD Candidate at the German Aerospace Centre (DLR). While his focus is control and locomotion for humanoid robots, he also supports general research in the RoboHub.

Redundant lightweight arm with a three-finger gripper from Kinova Robotics. Includes torque sensing and infinite rotation in each of its seven arm joints and compliantly adaptive fingers.
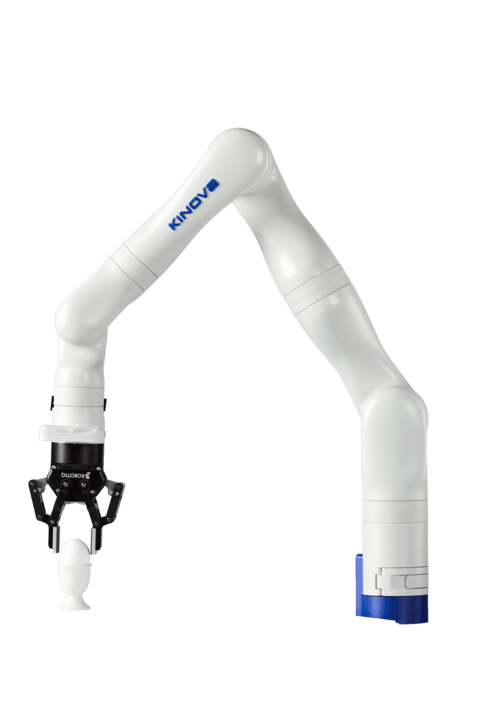
Ultra lightweight arm from Kinova Robotics with a user-friendly interface. Includes torque sensing in each of its seven arm joints, a video + depth camera at the wrist, and several infinite-rotation joints.

Outdoor research platform from Clearpath Robotics. Includes a large payload area with integrated power, a rugged design, a high-torque drivetrain, and a large user base.

Small weatherproof research platform from Clearpath Robotics. This fast entry-level field robotics platform has an onboard computer, GPS, and IMU all integrated into a ROS environment.
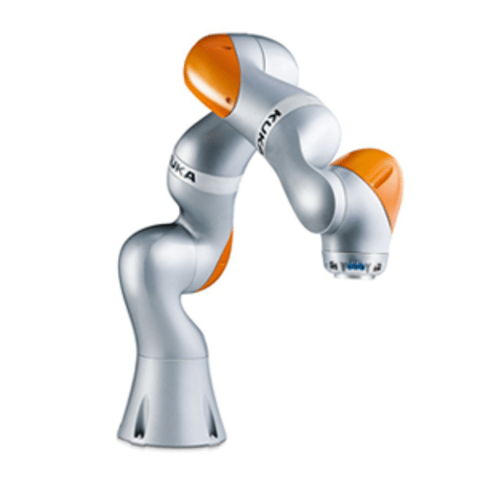
High performance robotic arm from KUKA. Sensitive to contact to enable both a safe collaborative working environment and to achieve delicate material handling and assembly tasks.
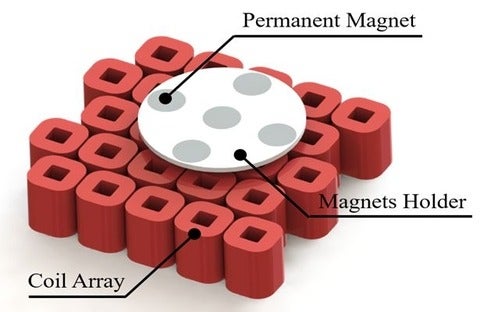
An array of controllable electromagnets embedded in the floor. Enables remote manipulation of up to 3 custom modules in free space via frictionless, high precision, non-contact motion control.

Magnetically levitated modules custom designed by members of the Maglev Microrobotics Lab. These modules move simultaneously and independently above the RoboHub's Magnetic Levitation Floor.

Large outdoor quadrotor from DJI. Includes an FPV camera, single or dual camera gimbals, stereo vision and laser sensors for obstacle detection, and precision outdoor localization using D-RTK GPS.

A dual-arm mobile manipulator from Kinova Robotics with a holonomic base and a raisable body. Includes a pair of JACO² arm mounts and a Kinect One on a pan-tilt mount.
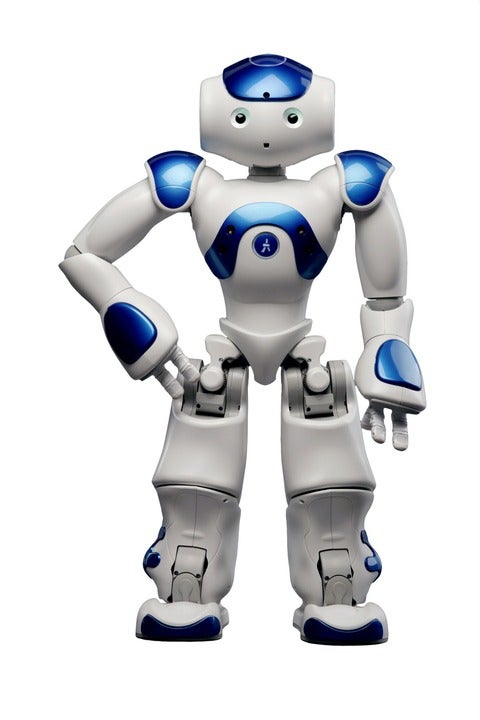
Small humanoid robot from Softbank Robotics. Includes directional microphones, dual cameras, text-to-speech, built-in natural language processing and image recognition, and a global user base.

Easy-to-use collaborative robotic arm from Franka Emika. Programmable via a touch interface which can learned in minutes, while sensitive enough to move lightweight parts safely near people.
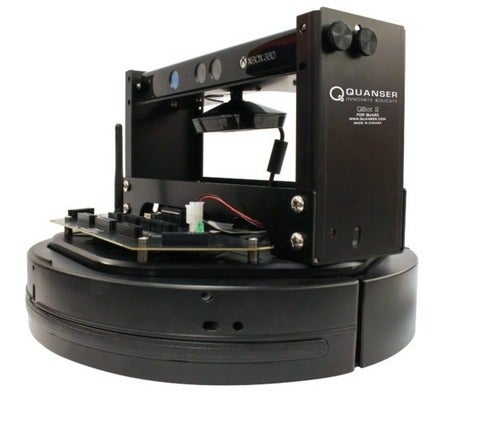
Autonomous indoor sensor platform from Quanser. This open-architecture system has over 30 sensors and a host of expandable digital and analog I/O channels available for any custom sensing needs.

High-performance indoor quadrotor from Quanser. Its carbon-fibre frame holds an Intel Aero Compute Board with built-in WiFi and native support for the platform's RealSense and optical flow cameras.

Omnidirectional indoor research platform from Clearpath Robotics. Includes dual (front and rear) LIDAR, a precision holonomic drivetrain, passive suspension, and high-resolution encoders.

ROS Educational Platform from Husarion which connects to the AWS RoboMaker platform. This robot is used by students for learning ROS, sensor fusion, and cloud-based robotics.

Full-size humanoid robot from PAL Robotics. Includes torque sensing and control at all joints, force-torque sensing at wrists and ankles, and a large arm workspace with high payload limits.

Indoor positioning system using a set of 20 VICON Vantage V5 cameras. Includes on-board marker processing, internal accelerometer for vibration avoidance, and app-based calibration interface.

High definition motion capture reference video is available via a pair of VICON Vue cameras. Enables frame-synchronized colour video overlay for motion capture and indoor positioning data.

Amphibious outdoor research platform from Clearpath Robotics. Includes rugged design and traction tires for all-terrain mobility and a modular payload bay with power and communication ports.