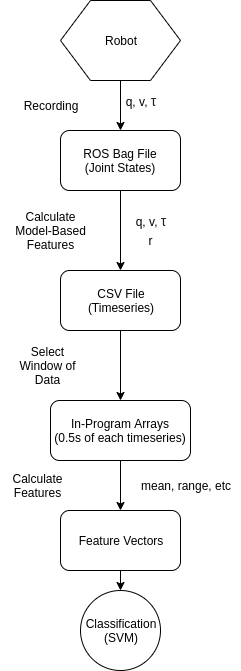
Picture of the TALOS robot Diagram of how the classification works 1 / 2 Picture of the TALOS robot 2 / 2 Diagram of how the classification works
Picture of the TALOS robot Diagram of how the classification works 1 / 2 Picture of the TALOS robot 2 / 2 Diagram of how the classification works