We train robots to solve general tasks using only images.
We train robots to solve general tasks using only images.

Wearable computer vision and deep learning are combined for real-time sensing and classification of human walking environments.
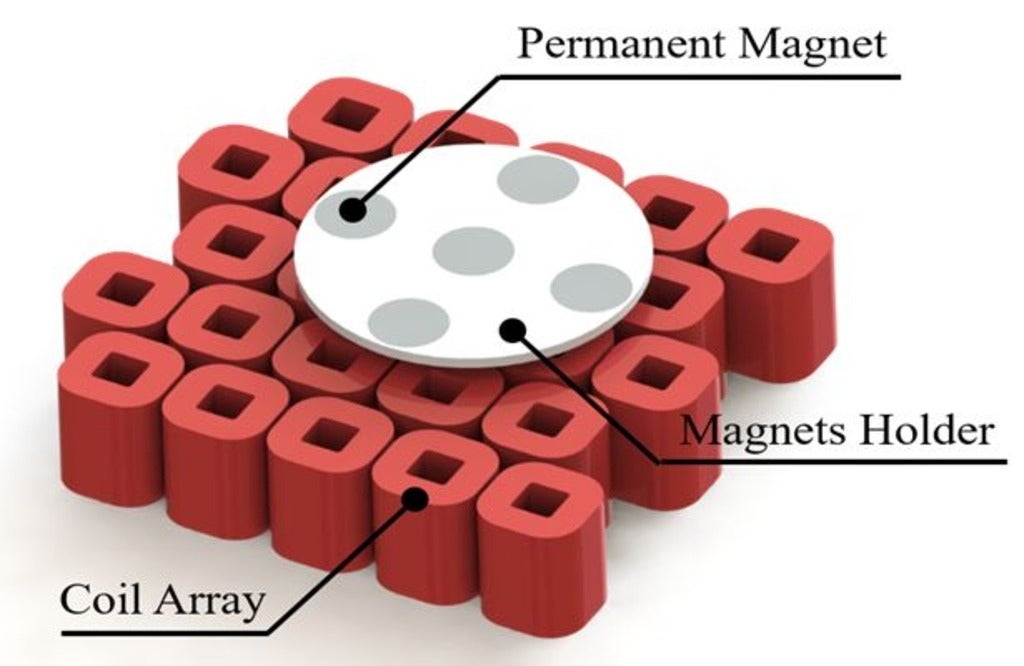
The goal of this project is to levitate a group of robots in 3D space using electromagnetic energy. MagLev (magnetically levitated) robots, providing frictionless motions and precise motion control, have promising potential applications in many fields. Controlling magnetic levitation systems is not an easy task; therefore, designing a robust controller is crucial for accurate manipulations in the 3D space and to allow the robots to reach any desired location smoothly.
This project focuses on deploying a set of autonomous robots to efficiently service tasks that arrive sequentially in an environment over time. Each task is serviced when the robot visits the corresponding task location. Robots can then redeploy while waiting for the next task to arrive. The objective is to redeploy the robots taking into account the expected response time to service tasks that will arrive in the future.