Design team members: Ashraf Tahir, Ehab Tahir
Supervisor: Professor David Wang,
Background
With the drive towards smaller and efficient mechanical systems there is a growing demand for powerful and lightweight actuators. Smart materials are being investigated as a technology to fulfill this need. Smart materials are able to alter their physical properties in response to an external influence, such as temperature, pH levels, current or magnetic fields. As a result of this characteristic, powerful smart material actuators are being considered as an alternative actuator in an increasing number of applications. However these smart materials behave in a highly non-linear fashion and there exists hysteresis in the actuator response, both of which make achieving an effective control algorithm difficult. Some examples of smart materials are Shape Memory Alloys (SMA), piezoelectric ceramics and Electroactive Polymers (EAP).
Some Examples of Smart Material Actuator Applications
Electroactive Polymers (EAP) are polymers that can change properties when an external stimuli is applied. A common example is the light emitting polymers found in Timex Indiglo watches. There have been developments of an EAP called Ionic Polymer Membrane Metal Composite (IPMC) that will bend when an under an applied electric field.
The following picture illustrates an end effector using IPMCs.
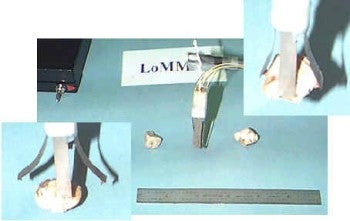
An end-effector gripper lifting 10.3-g rock under 5-V, 25-mW activation using four 0.1-g fingers made of Ionic Polymer Membrane Metal Composite. Developed by Nasa JPL group http://eis.jpl.nasa.gov/ndeaa/nasa-nde/lommas/aa-hp.htm
Researchers have been investing the use of Shape Memory Alloys (SMAs) as Actuators. SMAs are materials that remember their shape. When deformed at cool temperatures, SMAs can be returned to their original shape through heating (this is a function of phase changes within the alloy). SMAs are capable of recovering strains of up to 8%. However their effectiveness is limited by their slow cooling rates. To improve the response, dynamic cooling techniques have been investigated. The following figure depicts one such technique that uses a moving heat sink.
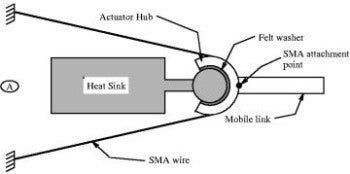
A shape memory alloy actuator using a moving heat sink. Developed by Rob Gorbett (a former UW grad) vist Gorbertt's website
Project description
The objective of this project is to design and a two-degree of freedom planar robot using smart materials as actuators.If feasible, it is intended to equip this robot with a smart material end effector capable of gripping a microchip.
Design methodology
Since the conventional actuator (DC motor) has been eliminated as an option, the problem has become more than simply designing and manufacturing a two-degree of freedom planar robot and its controller.The actuator will dominate the overall mechanical design of the robot.Therefore before any design can begin on the robot, the actuation technology must first be chosen.
The following is a summary of the design approach that will be taken:
-
Identify and investigate potential smart material actuators.
-
This consists of an extensive literature research on existing and new smart materials.
-
Select the smart materials to be used (investigated), through a set of criteria and constraints.
-
Design and test actuator implementation schemes using the selected smart materials.
-
Design and construction of robot arm.
-
Test the performance of the robot in terms of response time, accuracy and stability.