We are investigating a wide variety of applications for t-spanning primitives including determining a set of motion primitives for autonomous driving given human driving data and for robotic manipulators.
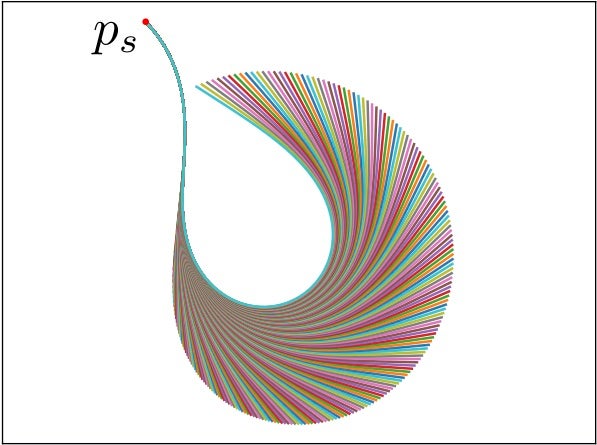
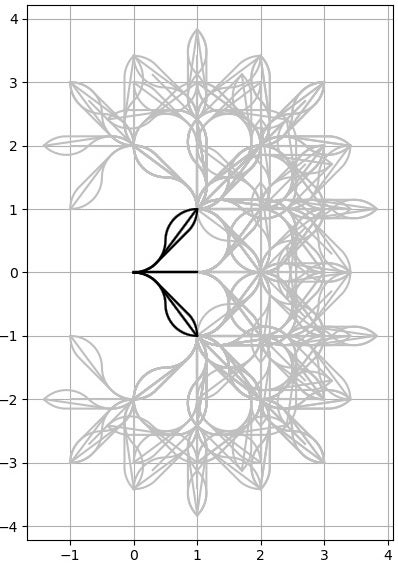
As a second component of this project, we are developing efficient methods for computing robot motions that can be used as primitives. The key idea is to generate trajectories where the curvature, derivative of curvature, and angular jerk of the curve are all bounded.