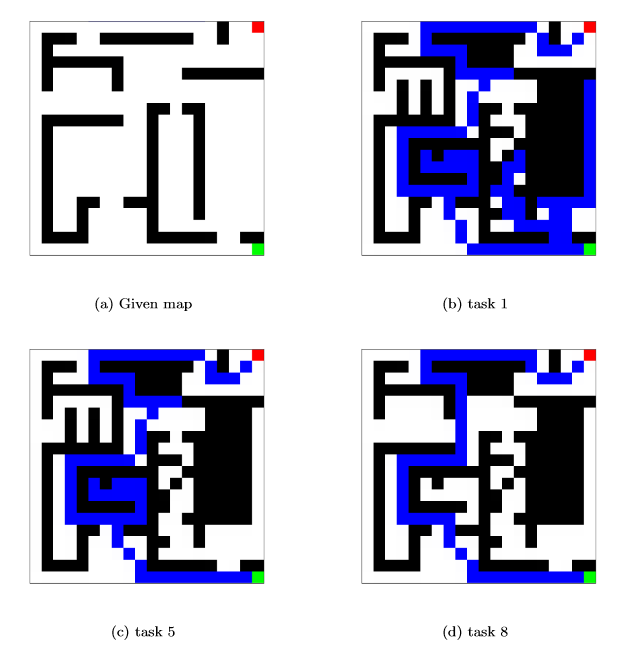
This project focuses on reducing the distance a robot has to travel when repeatedly moving between destinations in an uncertain environment.
This project focuses on reducing the distance a robot has to travel when repeatedly moving between destinations in an uncertain environment.