Physical human exoskeleton interaction modeling, evaluation and control
Researchers: Christian Mele, Jhilik Bose, Niko Forsyth, and Erica Rossi
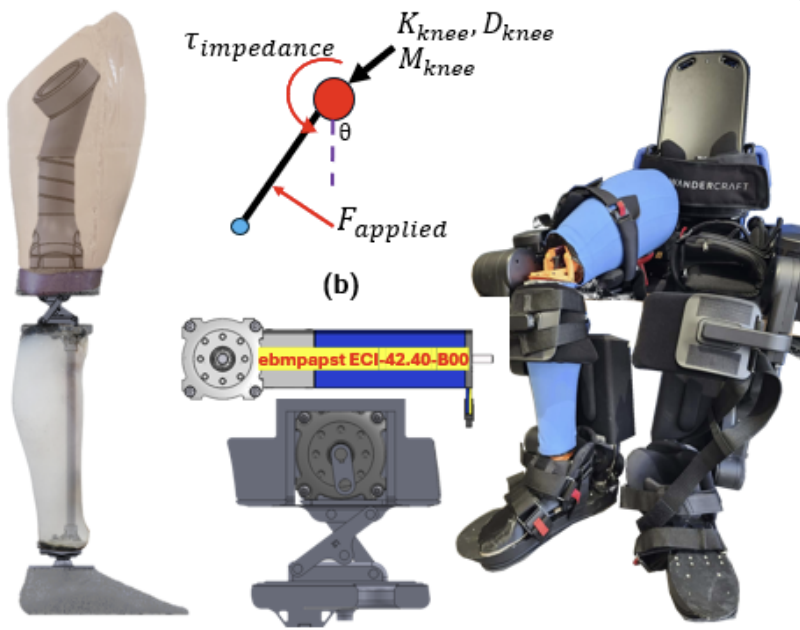
Lower limb exoskeleton interface interactions are currently not well understood. The modeling, evaluation and design of exoskeleton interfaces is poorly defined and often too simplistic for a highly complex problem space - especially for its potential to influence skin and tissue health during device use. Our research focuses on advancing modeling, evaluation and control of exoskeleton coupling interfaces to improve clinical interactions and control of interface interactions. To date, our work has focused on developing improved evaluation methods and models to support design and control. Future focus will be placed on optimal control and mechanical design. This work is supported by our mannequin - developed in lab it is currently one of three devices of its like in the world designed specifically for exoskeleton interaction evaluation.
Publications:
- C. Mele, A. Yu, J. Bose, K. Mombaur, and J. Tung, “Design and Sensor Based Evaluation of Custom-Fit Coupling Interfaces for Lower Limb Exoskeletons: A Pilot Study,” 2025 47th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), pp. 1–7, Jul. 2025, doi: https://doi.org/10.1109/embc58623.2025.11254927.
- C. Mele, D. Choi, K. Mombaur, and J. Tung, “A Novel Elastic Model for Exoskeleton-User Coupling Interfaces,” 2025 International Conference On Rehabilitation Robotics (ICORR), pp. 1576–1583, May 2025, doi: https://doi.org/10.1109/icorr66766.2025.11062987.
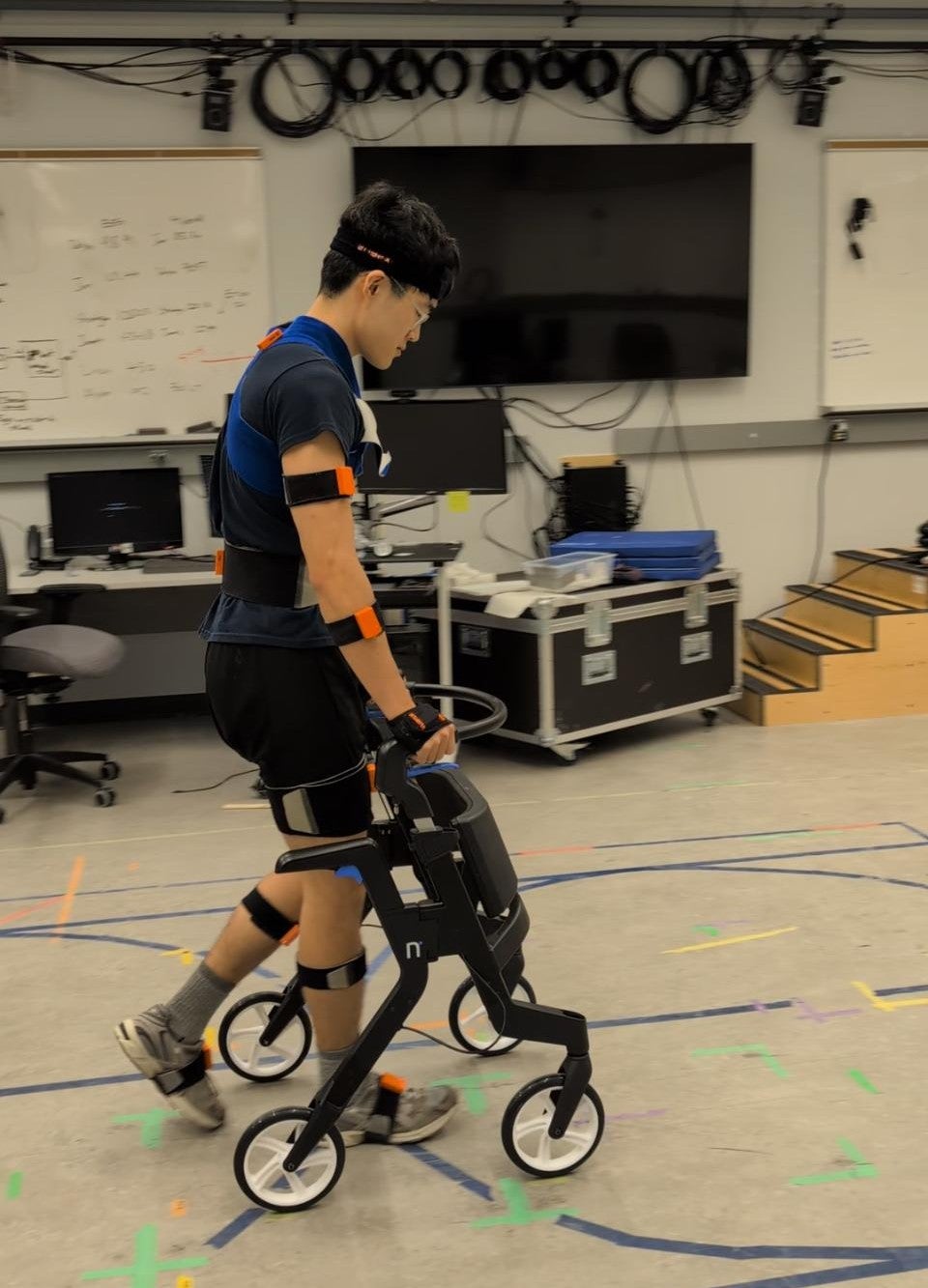
Comparative Evaluation of Rollator Mobility
Researchers: Christian Mele, Arshak Petrosyan, and Harvey Marchant
Despite the recommended use to address gait and balance disorders, ~50% of rollators are abandoned for reasons associated with usability, such as poor maneuverability, difficulty using brakes, and limited accessibility (e.g., functional reach). Recent evidence indicates major fall risks associated with transfers (e.g., sit-to-stand, vice-versa) and adaptive mobility tasks (e.g., turning, stopping, reaching), warranting advancement in rollator designs to address these limitations. The study's industry partner, Nuvio, was founded by a practicing physiotherapist specifically to advance walking aids and their initial product, the Nuvio One rollator, is aimed directly at transfer assistance and expanding the breadth of adaptive mobility tasks. Current work consists of analyzing data collected with young adult participants and collecting data with older adult participants following a more extensive protocol.
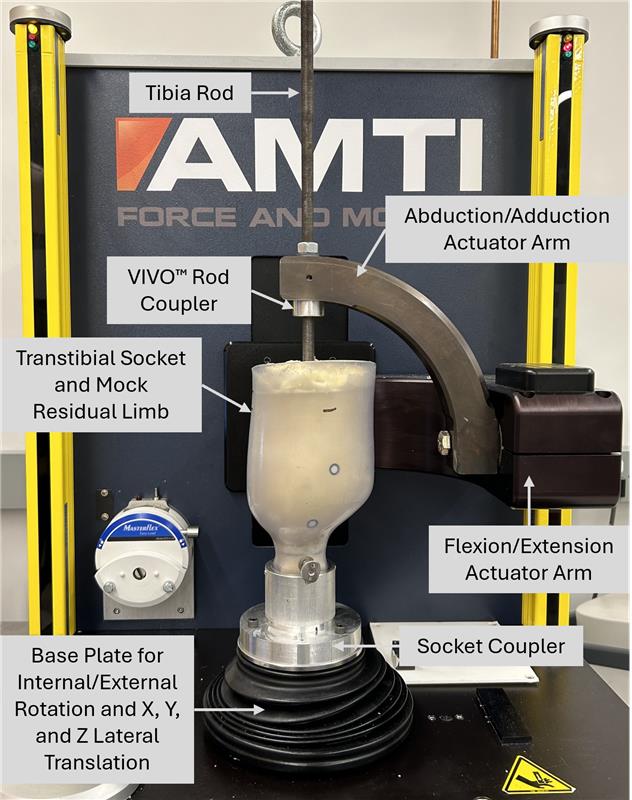
Dynamic Gait Testing of Transtibial Prosthetic Sockets
Researchers: Erica Rossi, Christian Mele, Myles-Cohen Chan, and Niko Forsyth
Current transtibial prosthesis testing standards (ISO 10328) do not specify isolated testing on the prosthetic socket which acts as the main interface between the residual limb and the prosthesis. This research aims to explore this gap by developing novel Mock Residual Limbs to support dynamic mechanical gait testing that is specific to prosthetic sockets. Through employing custom amputee gait waveforms to simulate the moments and forces imparted on the socket during gait, a more holistic understanding of the socket can be made. Additionally, with innovations in socket technology rapidly growing (3D printed sockets, smart liners, inflatable bladders), it is vital that the mechanical testing methodology grows alongside it as to assist in early-stage evaluation on safety and function prior to user testing.
Publications:
- R. Z. Gao et al., “Soft Dynamic Fluidic Cushion for Pressure Sore Management in Transtibial Prosthetics: A Proof-of-Concept Study,” IEEE Transactions on Biomedical Engineering, vol. 73, no. 3, pp. 1221–1235, Mar. 2026, doi: https://doi.org/10.1109/tbme.2025.3600562.
- E. Rossi et al., "Towards Socket Testing Standardization: Advancing Mock Residual Limbs for 6DOF Gait Simulation," in I.S.P.O. 20th World Congress Abstract Book, Stockholm, Sweden, June 16–19, 2025, p. 344. [Online]. doi: 10.82017/ISPO2025.ABSTRACTBOOK