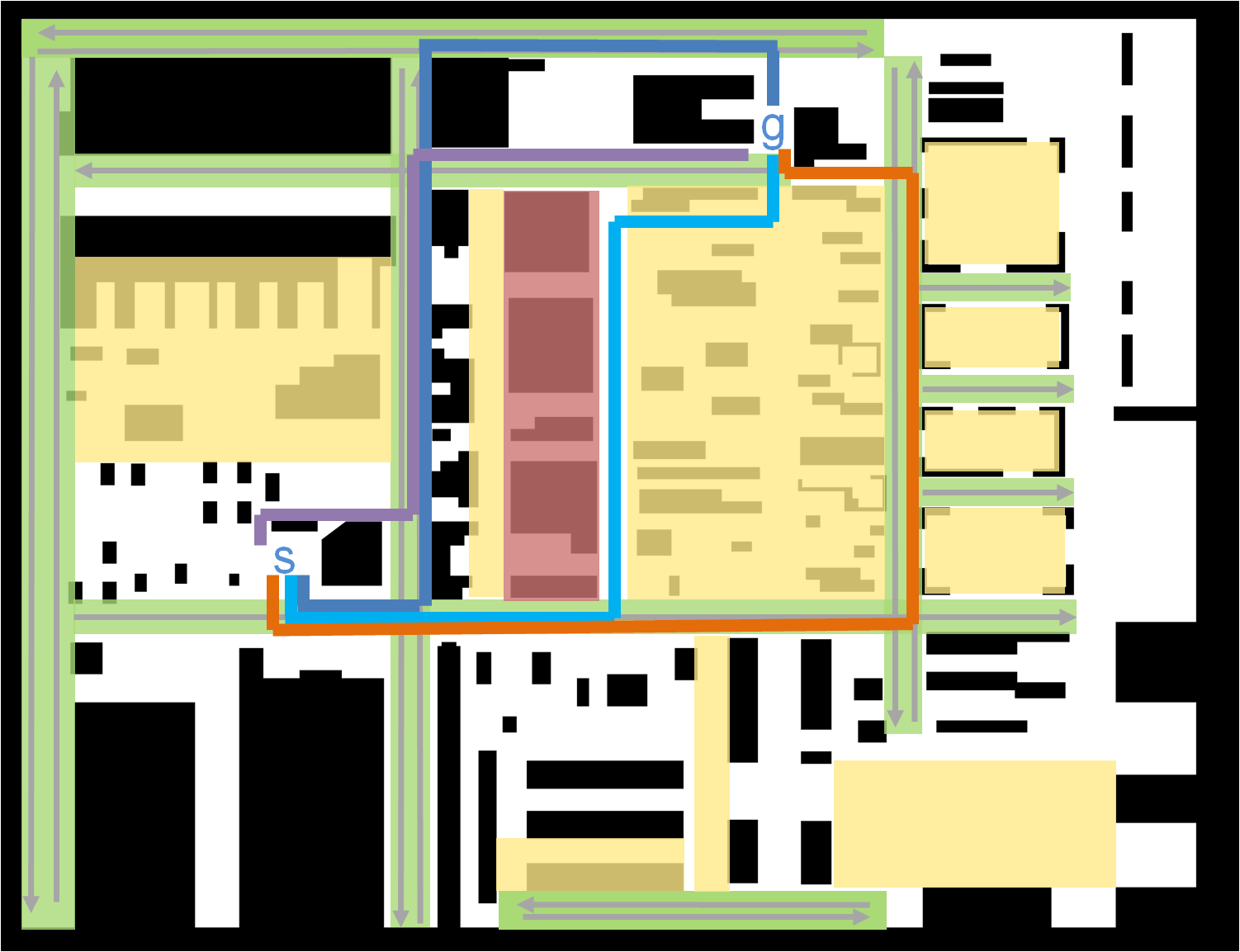
The practical validation of this project includes user studies with a material transport task in an industrial facility. In a first study nearly all users accepted alternative solutions and thus obtain a revised specification through the learning process, and that the revision leads to a substantial improvement in robot performance. Further, the users whose initial specifications had the largest impact on performance benefit the most from the interactive learning. Recently, the work has been extended to learning from corrections, where user's alter the robots behaviour by manipulating the current trajectory.