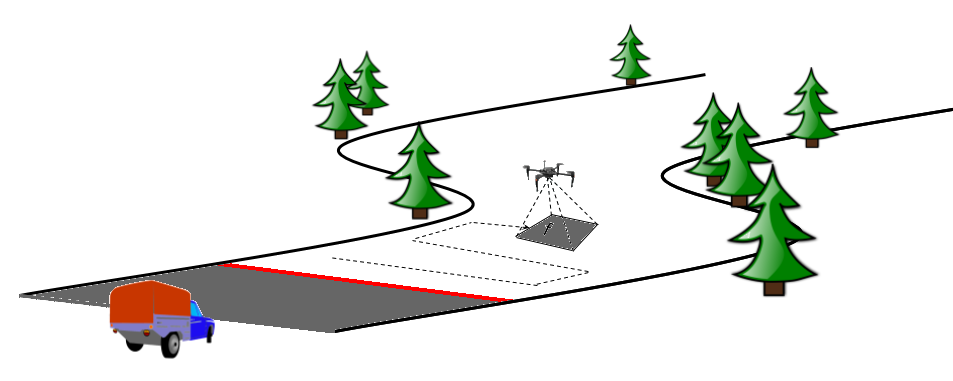
This project investigates cooperative coverage planning using a unmanned aerial vehicle and a ground vehicle. The UAV flies ahead of the ground vehicle and provides sensor information of the path ahead. Initially we established the necessary and sufficient resources for complete coverage a corridor surrounding the ground vehicle's path. Currently, we are investigating methods of reducing the coverage demand by selectively mapping only those sections of the environment that are not observed by the ground vehicle as it travels through the environment.