TERRITORIAL ACKNOWLEDGMENT
The Department of Mechanical and Mechatronics Engineering acknowledges that much of our work takes place on the traditional territory of the Neutral, Anishinaabeg and Haudenosaunee peoples. Our main campus is situated on the Haldimand Tract, the land granted to the Six Nations that includes six miles on each side of the Grand River. Our active work toward reconciliation takes place across our campuses through research, learning, teaching, and community building, and is co-ordinated within the Office of Indigenous Relations.
A MESSAGE FROM THE CHAIR
Mike Collins
Professor and Chair
Welcome to our nineteenth annual Mechatronics Engineering Capstone Design Symposium.
This exciting event provides our final-year student teams an opportunity to showcase their design projects to the general public, to industry partners and sponsors, and to the university community.
The students have worked hard from conceptualization to finished product and are being judged on a variety of skills. Their end-to-end process included identifying needs, creating solutions and designs to address a variety of challenging problems in diverse areas including: advanced manufacturing, assistive robotics and health monitoring devices, AI powered tools, educational robotics, environmental solutions, and so much more. The teams have demonstrated competence in applying the knowledge and skills acquired over the course of their undergraduate academic and co-operative work terms to address these challenging topics.
This is also a major component in our continuous improvement plan for the Mechatronics Engineering program, a plan for providing the best possible education experience for our students. The enthusiasm with which these teams present their work should be evident, and attests to the effort and teamwork that they have put into their projects over the past eight months.
We invite you to engage with the students about their designs, admire the presentations and prototypes, and check out their videos and websites. When you are inspired and excited by the students’ work, feel free to suggest other design project challenges and opportunities to them and their course instructors (contact information at the end of this brochure). To find out more follow us at our Department of Mechanical and Mechatronics web page.
We are proud of our Mechatronics students for their achievements this past term. We all recognize and appreciate the effort it took to get here. We are also eternally grateful to our esteemed Mechatronics Engineering professors, technical staff and administration, the companies and people who help educate our students in the co-operative program, and to the kindness of our sponsors of this event. Your support is important and valued. Thank you!
Sincerely,

Mike Collins
Professor and Chair
Department of Mechanical and Mechatronics Engineering
CAPSTONE DESIGN PARTICIPANTS
1. ON AIR TECHNOLOGIES
2. L.I.D.D.E. Loupes
3. Mora
4. PneuBra
5. Goal-E
6. HALO (Hybrid Abdominal Lateral Orientation)
10. ThermoTherapy
11. UwUBand
12. Plantbox
13. OSCAR
14. EVA
15. DABAM: Automated Nanoparticle Synthesizer
16. roamr
17. RallyHub
18. H.A.L.O
19. Finger++
20. Goalie Wingman
21. Clarity +
22. AI Passing Partner
23. WAFFLE Systems
24. Onset
25. Team Sourdough
26. FORGE
28. Kolibri AeroTech
31. SMA Toy Maker
33. bananaHand
34. DebriScout
36. EduTron
37. XCalibur
38. Interforce
39. E.L.B.E.R.T.
40. OMNI
41. Therma’fyx
42. RinkStat
43. SPWL
44. Vision AI
45. CardioScope
46. KEY²
47. BATSWAP
48. FabrIQ
49. Exoni
50. SPIFFY
51. NDHT
52. BALLIN

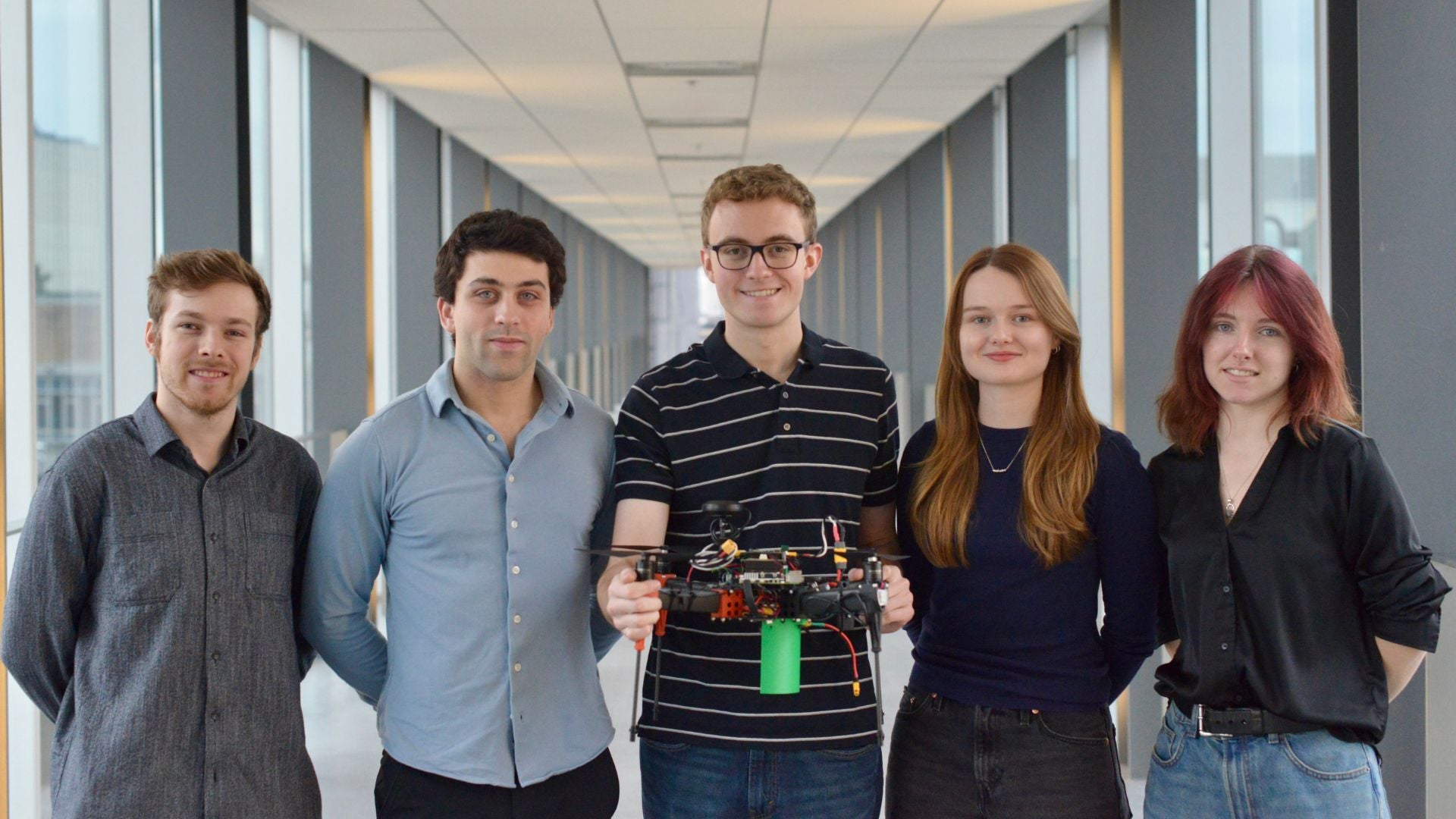
1. ON AIR TECHNOLOGIES
Alyzen Jeraj, Phoebe Luo, Andy Meng, Matthew Ortlieb
ON AIR TECHNOLOGIES makes drone photography effortless. No more juggling cases, forgetting to charge batteries, or long setup times. Our all-in-one drone backpack is built for creators who want to move fast and stay focused. We replace the manual friction of current drones — unfolding propellers, attaching batteries, and booting delays — with single-click deployment. With integrated charging, automatic footage transfer, instant launch and landing, everything you need lives in a single wearable system — ensuring our drones are ready to fly when you are.
2. L.I.D.D.E. Loupes
Chelsea Dmytryk, Nick Drazso, Nathan Rowe, Lili Strong, Natalie Tsang
Our team is designing a pair of smart medical loupes to improve ergonomics for surgeons and dentists. Our device will eliminate neck, nose, and back pain caused by traditional loupes, significantly improving career longevity and quality of life, while increasing operational efficiency.

3. Mora
Donald Lau, Owen Li, Titus Lin, Mulei Mao
We are making a hydroponic farm and harvester for Wolffia, a superfood plant. It has 40% protein by dry weight and can accumulate vitamins and minerals. It doesn’t need arable land to grow and doubles in mass every 2-3 days. Thus, Wolffia is the best plant-based alternative to meat. The problem is that Wolffia is hard to grow indoors. This project involves creating a scalable, automated cultivation system to grow next generation superfoods. We need more protein. We need more nutrition. Eat healthy. Eat Mora.

4. PneuBra
Evangeline Dryburgh, Jocelyn Lim, Janvi Patel, Jack Pearson
62% of women experience difficulties breathing while wearing a sports bra, and more than half report associated bodily pain. PneuBra intends to address these problems through an adaptable, individually adjustable pneumatic support system for athletes. By integrating sensors, pneumatic actuators, and direct user feedback, this system enables customized fit across varying exercise intensities. By improving comfort and function, PneuBra seeks to reduce physical barriers to participation and provide greater accessibility for women in sport.

5. Goal-E
Christian Bergmann, Andrew Willms, Jonathan Gervais, Erik Smith, Josh Cooke
We are designing an autonomous hockey training device for use in player shooting practice. The device will feel, react and look like a real goaltender. It will track the puck across the ice and providing meaningful training opportunities while reducing goalie injury risk.

6. HALO (Hybrid Abdominal Lateral Orientation)
Kevin Kim, Jerome Lu, Siha Pyo, Lucy Yandeng, Eddy Zhang
HALO (Hybrid Abdominal Lateral Orientation) is a portable, wheelchair-mounted breathing assistance system designed to support patients with chronic respiratory conditions. This project is inspired by individuals with conditions such as Pompe disease or quadriplegia who rely on caregivers to manually apply abdominal pressure to facilitate effective exhalation. Existing solutions are too bulky, stationary, or intrusive, creating mobility limitations and reducing patient independence. HALO addresses this gap by providing a solution that enables on-demand breathing assistance during wheelchair use, reducing caregiver dependence while maintaining respiratory support.
10. ThermoTherapy
Owen Henry, Connor Hughes, Parker Lawrence-Valeriani, Siddharth Muralikrishnan, Justin Yeung
ThermoTherapy the future for rehabilitation for physiotherapy, injury recovery and surgical recovery. By automating contrast therapy, our wearable device delivers precise heating and cooling cycles to injured areas. The rapid thermal exchange reduces inflammation and helps blood flow more effectively than static ice or heat packs which perfect for clinic use or at home post operation.

11. UwUBand
Sam Ellenbogen, Jacob Gordon, Daniel Kang, Victor Karaboychev, Sidharth Sreeram
UwUBand is a wearable tracker for use in different environments like amusement parks and resorts. Currently, systems like RFID wristbands are used in these applications. However, these can only track the last known location when scanned. Our proposed solution aims to fill this gap, allowing for continuous tracking of guests to improve safety, access control, and crowd management. This would make it easier to find lost individuals and provide valuable data about park activity.

12. Plantbox
Rayan Ahmad, Momin Chaudhry, Nolan Haines, Aaron Sarkar, Andy Zhen
We are Team Plantbox, and we aim to develop a fully autonomous and scalable tabletop greenhouse suitable for both urban and small-scale commercial environments. Our modular, energy-efficient device controls growth factors such as heating, nutrient-added plant watering, and lighting to optimize growth for a variety of plant profiles.

13. OSCAR
Irekanmi Awoyiga, Miklos Balogh, Jordan Goldbloom, Taras Rawlinson
Brackish groundwater desalination is critical to addressing water scarcity, yet disposing of the concentrated brine byproduct creates a massive economic hurdle. For California wineries and farms, current disposal methods are expensive at scale. Our project addresses this need by engineering OSCAR, a Mechanical Vapor Recompression (MVR) Brine Processing Unit (BPU) that evaporates water from brine using minimal energy. Designed for standard 120V wall power, our scalable prototype separates brine into reusable water and manageable salts, providing a cost-effective alternative to traditional brine disposal.
14. EVA
Douglas Huang, Colin Kwan, Jeffrey Li, Nathan Xie, J.D. Zhu
With resistance training and the gym becoming more and more mainstream, individuals need reliable guidance to not only prevent injury, but to maximize hypertrophy. We introduce you to EVA, a wearable compression shirt that tracks muscle activation and bio-mechanics to provide real-time feedback when conducting free weight exercises.
15. DABAM: Automated Nanoparticle Synthesizer
Brianna Gonzalez, Michal Mastej, Aidan Melville, Arni Nalawade, Dominik Wojtas
Design an automatic fluid injector that would allow for consistent synthesizing of nanoparticles, by controlling volume, flowrate and timing of adding liquid chemicals to a solution. Eight syringes are loaded onto a circular tray. The syringes are pushed by a lead screw mechanism, enabling precise displacement and accurate flow control. The indexing is done by a stepper motor beneath the tray that rotates the assembly positioning the selected syringe over the flask.
16. roamr
Nathan Li, Kai Ma, Anders Tai, Olivia Ye, Thomason Zhou
We are on a mission to build a really open-source autonomous mobile robot (roamr) based on a device that already lives in everyone's pocket: the iPhone. Developers face a cost-capability tradeoff for robotics platforms, where they typically need to choose between affordable robots with limited functionality vs highly capable platforms that are extremely expensive. We aim to close this gap by building a fully fledged robot capable of running end-to-end autonomous navigation, leveraging the iPhone's compute and sensors (IMU, Camera, LiDAR) to save costs.

17. RallyHub
Sam Devey, Dan Huynh, Jackie Le, Owen Stephenson, Josh Blayone
Meet your new favorite training partner: a high-speed robotics system designed to elevate your table tennis game. Using a real-time computer vision system to track incoming shots; a five-bar linkage moves a paddle swiftly along the back of the table to execute returns and keep the rally alive. If you're looking to improve your skills, this tireless opponent provides an ideal, on-demand practise environment.
18. H.A.L.O
Mena Azab, Carter Demars, Jared DiZio, Dylan Ellingson
H.A.L.O is a clinical-grade canine wearable designed to eliminate the post-operative monitoring gap. Our solution leverages a wearable multi-sensor array and signal-processing algorithms to continuously track canine vitals, like heart rate, respiration, and temperature, during high-risk recovery. By transforming labour-intensive monitoring into an automated "digital RVT", H.A.L.O enables clinics to protect patients without increasing headcount. We are shifting the paradigm and establishing new global standard of care in veterinary medicine, making unmonitored recovery a relic of the past.
19. Finger++
Ryan Chan, Anson Cheng, Ethan Hsu, Suhani Trivedi, Olivia Zheng
Finger++ is a wearable supernumerary finger system that supports individuals with reduced hand strength and dexterity, including those recovering from stroke, while also enhancing manipulation for the general population. The system integrates a sixth robotic digit with natural hand function through biosignals, motion sensing, and contextual inference to improve grip strength, dexterity, and multi-tasking. The digit is both an assistive and augmentative technology, applicable across professional and everyday contexts.
20. Goalie Wingman
Reece Buttenham, Mikhail Fonin, Alex Goulding, Dmitri Taves
Goalie Wingman is an advanced hockey goalie training system designed to enable effective solo practice, eliminating the need for multiple participants typically required by traditional training methods. The device can accurately launch hockey pucks from a wide range of distances and at variable speeds, with precise control over shot placement anywhere within the goal. An intuitive user interface allows athletes or coaches to select specific shot locations, sequences, and training patterns to simulate realistic game scenarios, providing goalies with a comprehensive, high-performance training solution.

21. Clarity +
Akam Dhillon, Nikunj Patel, Abhinav Ramesh, Amna Shakeel, Dhruv Thakkar
Clarity+ is a clever smart mirror that turns regular mirror use into proactive wellness tracking. It provides posture tracking, real-time skin health analysis, and personalized wellness insights within the home by combining imaging, sensors, and on-device AI. Clarity+ promotes regular, preventative health practices while lowering dependency on dispersed devices and expensive clinic visits by fusing privacy-preserving local processing, modular hardware, and telehealth compatibility.

22. AI Passing Partner
Nitpreet Bamra, Sumanth Kumar, Srijay Mundlur, Shangheethan Prabaharan, Aman Shah
The AI Passing Partner is an AI-powered smart football passing machine to enhance player training and performance. The system integrates mechanical, electrical, and software components to deliver accurate, repeatable passes with adjustable trajectory and direction. Using computer vision and mobile app control, the machine adapts to player positioning and running in real time. The solution aims to provide accessible, data-driven training for athletes, coaches, and sports programs.
23. WAFFLE Systems
Francisco Jao, Annie Lee, Angadbir Singh, Larry Wu, Waris Zahoor
Corrosion under insulation is a widespread and costly problem in industrial piping systems, where moisture trapped underneath insulation causes undetected defects to form over time. To address this, we developed a low-cost and portable pulsed eddy current (PEC) scanner that glides across the exterior of an insulated pipe and provides real time visualization of corrosion without requiring any insulation removal. The device supports 4 to 6” pipes, costs <$1000, and weighs <5kg, being far cheaper and usable than existing commercial solutions that are bulky and overpriced.

24. Onset
Kevin Gong, Austin Lew, Grace Liang, Vincent Nguyen
Onset is a volleyball training robot that replicates the speed, precision, and consistency of a professional volleyball setter. Using zero backlash capstan actuators, it targets high-level players and teams, delivering repeatable, game-realistic sets without relying on a human athlete.

25. Team Sourdough
Dharma Gupta, Evan Hall, Justin Joseph, James Li
ABI, a baking company, uses automated robotic systems to ensure their products are of top quality. To achieve this they send engineers across the world to calibrate these systems by hand. The goal of Team Sourdough is to streamline this calibration process and make it as easy and quick as possible to calibrate these systems, so that the engineers at ABI can better use their time and energy into making even better tasting and looking baked and pastry products.

26. FORGE
Moheb Abdelmasih, Daniel Bishara, Matthew Gerges, Kareem Mansour, Joseph Missak
FORGE is a fitness wearable designed to help users better understand their activity, and recovery. Developed through multidisciplinary engineering across firmware, electrical, mechanical, and software systems, the device collects biometric data through integrated sensors and presents it in a clear and intuitive mobile app. FORGE focuses on meaningful insights rather than overwhelming statistics, enabling users to track progress and make informed decisions about their training and overall well-being.

28. Kolibri AeroTech
Sehaj Cheema, Dimitrios Christopoulos, James Chen, Patrick Kimumwe, Yang Li
Kolibri is a holonomic quadcopter drone that is able to maneuver with 6 degrees of freedom. The name Kolibri is derived from the German word for hummingbird. Our drone mimics the aerial maneuverability and agility of hummingbirds to efficiently navigate through dense terrain, and comes with LiDAR sensors and a low latency (40ms) and high-bandwidth 120 fps camera to adapt to dynamic obstacles in real-time. Kolibri's precision and flexibility make it the ideal drone for search and rescue operations.

31. SMA Toy Maker
Todd Tang, Hao Tian
We’re SMA Toy Maker, and we’re building a robotic companion to support mental wellness. Instead of using clunky, traditional motors, we’re tapping into the industrial potential of Shape Memory Alloys (SMA). By using SMA as a soft actuator, we can create life-like, organic movements that feel more natural. Our project explores how soft robotics can bridge the gap between high-tech engineering and emotional support, turning advanced materials into a comforting, everyday friend.

33. bananaHand
Dew Bhaumik, Edwin Giang, Simon Gorbet, Lokesh Patel, Caleb Wong
bananaHand is an open source, 16-DOF/8-DOA, humanoid robot hand, designed to mimic human grasping! Our goal is to provide robotics researchers with an affordable platform to advance dexterous grasping/manipulation. Equipped with 10 tactile sensors, bananaHand is capable of both position-controlled and force-controlled grasping. With a modular mounting system and multiple communication interfaces, bananaHand is compatible with hundreds of robot arms. To showcase bananaHand’s capabilities, we developed an AI grasping policy for household objects and realtime vision based teleoperation.

34. DebriScout
Shanaya Barretto, Rumaisa Bhatti, Riya Patel, Shreya Singh
DebriScout is a sensor module used to detect debris at a sub-10cm scale in LEO (low earth orbit), addressing a current gap in detection which poses risk to all spacecraft. The module works through fusing data from 24GHz radar and a camera stream on an FPGA to deliver real time awareness of orbital hazards. It is designed to be easily integrated into a satellite as a payload.

36. EduTron
Ella Braun, Sai Prakash Kumar, Sandeep Nair, Aayush Soni, Shivain Vij
Edutron is an AI-powered teaching assistant designed to address teacher shortages in underserved and remote communities. Using a portable projector and computer vision, Edutron delivers interactive, multilingual lessons directly onto whiteboards or chalkboards, replicating traditional classroom teaching. The system supports real-time student questions, engagement through quizzes, and visual explanations with diagrams to improve understanding. Designed to be low-cost, energy-efficient, and easy to deploy, Edutron provides accessible, high-quality education without requiring individual student devices.

37. XCalibur
Daniel Fraleigh, Mary Grace MacDonald, Hayden Parsons, Alex Pasat, Patrick St. Cyr
Knife sharpening is an expertise that isn’t easy to learn quickly and lacks easy-to-use and effective solutions. Our group, XCalibur, is developing an automated knife-sharpening system that uses robotics and intelligent sensing to produce professional-grade sharpening results. We call this system ARES: Automated Refining Edge System. By reducing reliance on expensive third-party services and improving knife safety, the system supports overworked chefs, lowers operational costs and contributes to better work conditions in the food-service industry.
38. Interforce
Sejune Chang, Douglas House, Fayiz Ahmed Mohideen, Seth Winton
Interforce is a haptic tele-operation controller used to operate minimally invasive surgical robots. By measuring forces applied by the robot’s manipulator and applying opposing counter-forces upon the user, the sensation of force-feedback is realized. Through the Interforce system, an operator is able to “feel” what forces the robot is applying, allowing for a more natural connection, and a greater depth in control."
39. E.L.B.E.R.T.
Elbert Chen, Adel Chinoy, Shahithya Sukumar, Maureen Sun
E.L.B.E.R.T. is a low-cost, low-power fall detection and monitoring system built around a synchronized wrist and chest wearable system. By combining data from both devices, E.L.B.E.R.T. performs on-device sensor fusion to detect falls without relying on subscriptions or external operators. Using two sensing locations improves fall detection reliability and reduces false positives compared to single-sensor systems, while maintaining a simple, low-power, and comfortable design.

40. OMNI
Allen Loukiantchenko, Jacky Lim, Mann Patel, Neel Patel
OMNI is an educational modular robotic arm system that allows for the creation of unique learning environments for both school and extra-curricular settings. The system is designed around the swapping of individual joints and links to modify the capability of the system on the fly, granting students opportunities to learn both the kinematics and control of robotic manipulation systems by changing the DOF and Work Envelope, as well how to design manipulators for specific application requirements.

41. Therma’fyx
Joshua Hirji-Gliatis, Ryan Ketelaars, Mailyn Takayesu, Kaustubh Upadhyay
Our project is a wearable thermal regulation vest. This is a lightweight, actively regulated cooling vest designed specifically to mitigate heat stress in firefighters while they wear full bunker gear. The system utilizes a closed-loop liquid cooling garment, integrated with an endothermic chemical heat sink, and a smart control system that dynamically regulates cooling to maintain the wearer’s core temperature in a safe range (below 38°C).city, enabling its use in a humanoid robot's wrist, shoulder, and neck.

42. RinkStat
Andrew Di Gaetano, Domenic Hampson, Alex Lardis, Max Ornstein, Daniel Wecek
RinkStat is a retrofittable energy efficiency system for ice rinks. Using an IR camera coupled with a precision temperature node, we can accurately and continuously monitor the surface temperature of the ice without obstructing rink use. Knowing the surface temperature then allows us to modify the chiller settings in real time based on rink usage. By dynamically adjusting the refrigeration system to match actual conditions, RinkStat significantly reduces unnecessary energy consumption.
43. SPWL
Michael Botros, Conall Kingshott, William McCutcheon, Gavin Mesz
The SPWL (System for Processing Wires to Length) is a handheld automatic wire cutting and stripping device that fits into your toolbox as easily as a power drill. Insert a wire, configure strip length, cut length and quantity and let SPWL do the rest.

44. Vision AI
Eric Bettinson, Niels Fleming, Prateek Singh, Edward Stratiy, Benjamin Zhao,
Navigate the dark with Vision AI, a high-performance night vision headset that fuses IR and thermal imagery. Unlike standard digital systems, our custom FPGA design processes video streams with under 20ms latency, preventing the vestibular disconnect and motion sickness typical of budget devices. With a fully custom mechanical design, adjustable IPD optics, and active thermal management, Vision AI provides affordable, military-grade situational awareness for search and rescue or recreational use.

45. CardioScope
Roby Aldave-Garza, Rijin Muralidharan, Om Patel, Krish Vijayan
CardioScope is a smart stethoscope that blends classic auscultation with modern edge AI to flag irregularities in heart health. This handheld device uses an embedded microphone, custom signal processing, and on-board classification to provide instant feedback without requiring medical expertise. A companion mobile app securely streams heart sound data for deeper analysis, tracking, and sharing, opening the door to earlier, more accessible cardiovascular screening in clinics, homes, and remote communities

46. KEY²
Sabrina Argue , Catherine Hsu , Shaery Khondokar, Beverly Zeng
KEY² is a vehicle security system designed to prevent keyless car theft using two-factor authentication. A compact in-car module works with a mobile app on your mobile device to perform secure cryptographic verification and proximity checks before allowing engine start. By combining wireless communication, embedded systems, and cybersecurity, KEY² blocks relay and replay attacks while preserving everyday convenience.
47. BATSWAP: Battery Aerial Transfer & Swap With Autonomous Positioning
Nathan Green, Daniel Puratich, Megan Spee, Marko Vehauc, Georgia Vachon Westerlund
Project BATSWAP is an autonomous mid-air battery swapping system designed to eliminate unmanned aerial vehicle (UAV) downtime and enable continuous, long-duration aerial missions. Instead of landing every 20 to 30 minutes to recharge, a working UAV docks with a secondary “tender” drone that performs a battery exchange while both vehicles remain airborne. This capability enables persistent mapping and monitoring missions, such as environmental surveys, infrastructure inspections, and forestry or mining analytics, without relying on expensive crewed aircraft or multiple drones with identical payloads.

48. FabrIQ
Jake Chua, Joshua Scripcaru, Phillip Rojkov, Eric Wang, Kevin Wang
Using robotic arms and computer vision, we are developing a reliable way to automate the manipulation and folding of clothing items.

49. Exoni
Taim Al-Dabbagh, Egor Gorelyy, Hasan Khan, Nolen Zhao
We are developing a predictive-control exoskeleton knee that makes powered assistance commercially viable for hiking and running. Current exoskeletons remain confined to military and rehabilitation-focused medical applications because they prioritize maximum force over deployability — resulting in 27+ lb systems costing $90K+. Our innovation combines: 1) a Halbach array-backed quasi-direct-drive actuator, eliminating the iron core with a carbon fiber frame and achieving 17.6 Nm of assistance at under 3 lbs per leg (1/9th the weight of medical exoskeletons); 2) a predictive control algorithm that anticipates user motion via gait prediction with machine learning; 3) a bill-of-materials under $950 through using widely available components. Recent battery density improvements (>240 Wh/kg) now enable multi-hour operation at this weight. This creates the first sub-$1000 powered exoskeleton, entering a large commercial market as Canada's aging population (average age 42) seeks to maintain outdoor activity levels.

50. SPIFFY
Kate Bendall, Cassandra Hopkins, Vanessa Liu, Niveditha Renganathan, Tejas Soni
SPIFFY is a 3-axis benchtop CNC designed for single point incremental forming (SPIF), a dieless sheet metal forming technique that uses a blunt tool to apply a localized force along a predefined toolpath. By eliminating traditional dies, SPIF reduces tooling cost and lead time, enabling low-volume production and iteration. This machine is well suited for in-house prototyping in R&D and research environments.
51. NDHT
Gavin Grimm, Aidan Landry, Luke Johnston, Leo Xing
Non-Destructive Hardness Tester
An automated solution for testing the hardness of mining core samples and displaying the information to users.

52. BALLIN
Ameen Aydan, Joseph Bagheri, Samuel Mpoloka, Adesh Partap Singh, Chanuth Weeraratna
BALLIN is an omni-directional, modular sports wheelchair designed to lower barriers to participation in adaptive athletics, particularly wheelchair basketball. The system integrates motorized omni-wheels, real-time control, and intuitive user inputs to enable precise, responsive movement with reduced learning curve. Unlike traditional sports wheelchairs, BallIN is designed for shared, entry-level use in recreational facilities, allowing users to rent and play without owning specialized equipment. The project emphasizes accessibility, safety, and performance through robust mechanical, electrical, and control system design.
THANK YOU
SPONSORS

PROFESSIONAL, TECHNICAL AND ADMINISTRATIVE SUPPORT
Charles Day
Marisa Buettel
Amy Pelley
Clarissa Charles
Maggie Morin
Mihaela Vlasea
Behrad Khamesee
Eugene Li
Abdullah Barakat
Paul Groh
Richard Yan
Lisa McCarthy
Liz Skibicki
Kyla Campbell
Grace Hu
William Owen
Baris Fidan
Andrew Morton
John Thistle
Stephen Smith
FUTURE CAPSTONE DESIGN PROJECTS
For more information about Sponsorship Opportunities, these Mechatronics Engineering design projects or to inquire about joining us in future design projects, please contact:
Baris Fidan
519-888-4567 x38023
fidan@uwaterloo.ca
Share this page on social media:


