In collaboration with Communitech within the The Autonomous Vehicle Innovation Network (AVIN), WISE Lab completed the Lanelet2 mapping project. The goal of the project was to develop a method for generating Lanelet2 maps suitable for automated driving and validate the map using traffic simulations.
The developed method relies on QGIS as an map editor, which allows using existing map data created for Waterloo Region by Ecopia as well as high-definition maps from other sources. Additionally, QGIS provides a multitude of useful algorithms for processing the maps as well as powerful C++ and Python application programming interfaces (APIs).
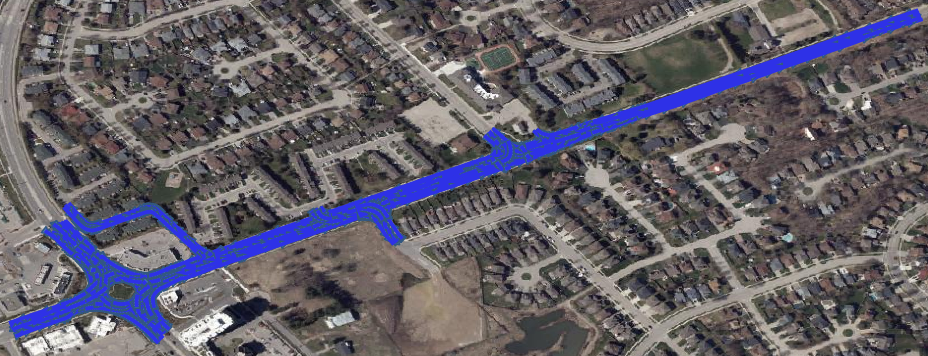
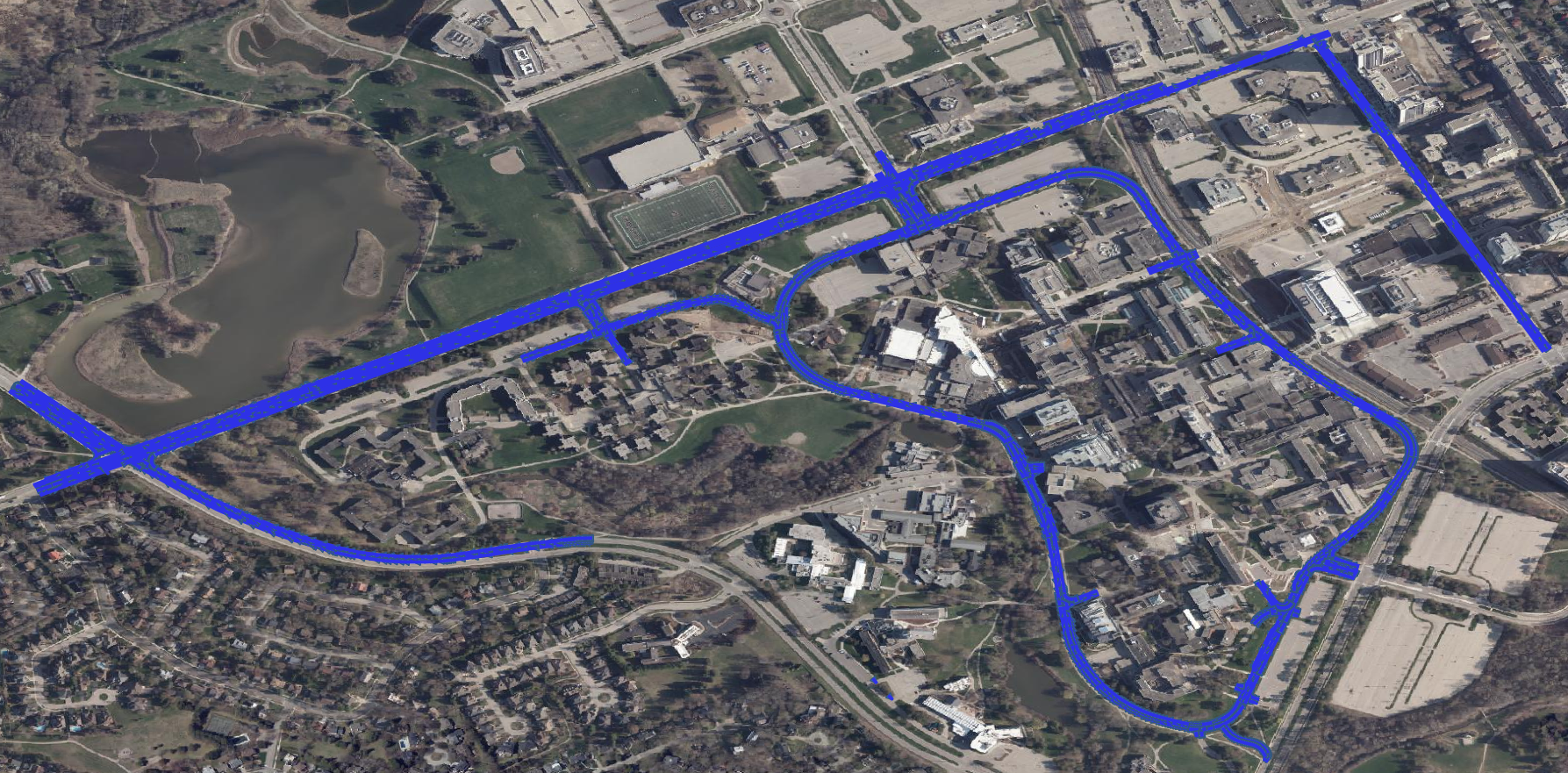
We designed Lanelet2 maps in QGIS for a few areas:
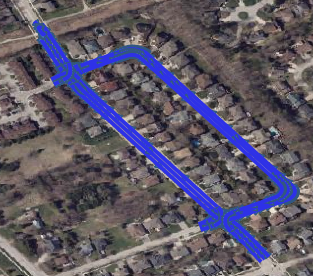
The image below highlights Lanelet2 design for a complex roundabout:

We developed software to fully automatically generate Lanelet2 maps in Open Street Map (OSM) file format from the data in QGIS. The generated Lanelet2 maps can be used by WISE ADS and other automated-driving systems. Additionally, we validated the maps using GeoScenario Server traffic simulations. For example, below is the traffic simulation of a sygnalized intersection:
Traffic simulation of an all-way-stop intersection:
Ring Road clock-wise
Ring Road-Columbia intersection with heavy traffic
For more traffic simulation videos, visit WISE Lab YouTube channel's playlist.
For more information about GeoScenario server and how the traffic simulation scenarios are defined, visit GeoScenario 2.0.
For detailed information, see the project summary presentation (.pdf) or PowerPoint Show (.ppsx) or contact Michał Antkiewicz.