
In this project we are developing ways of improving the performance of self-interested drivers in ride-sourcing applications.
In this project we are developing ways of improving the performance of self-interested drivers in ride-sourcing applications.
An important challenge in human robot interaction (HRI) is enabling non-expert users to specify complex tasks for autonomous robots.
This project involves the development of sampling policies to map the spatial variability of certain environmental factors.
The project aims to study the role that human trust and expertise play in a setting where a robot is tasked at providing assistance to its human teammates in ac
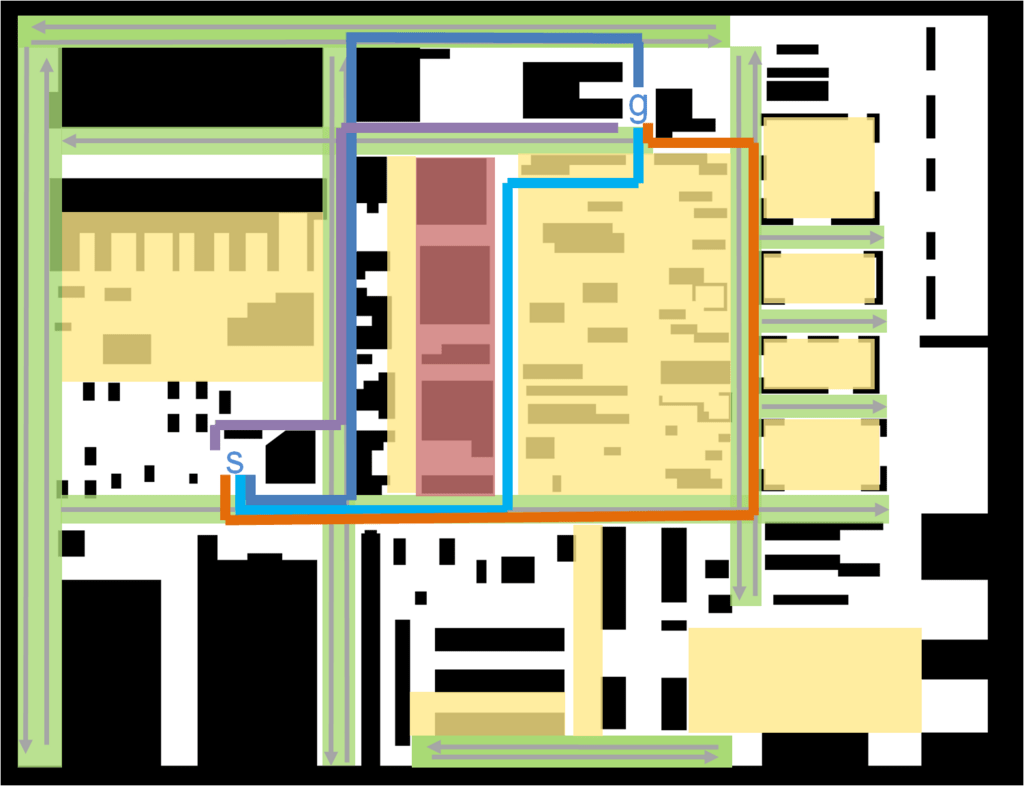
This project focuses on reducing the distance a robot has to travel when repeatedly moving between destinations in an uncertain environment.
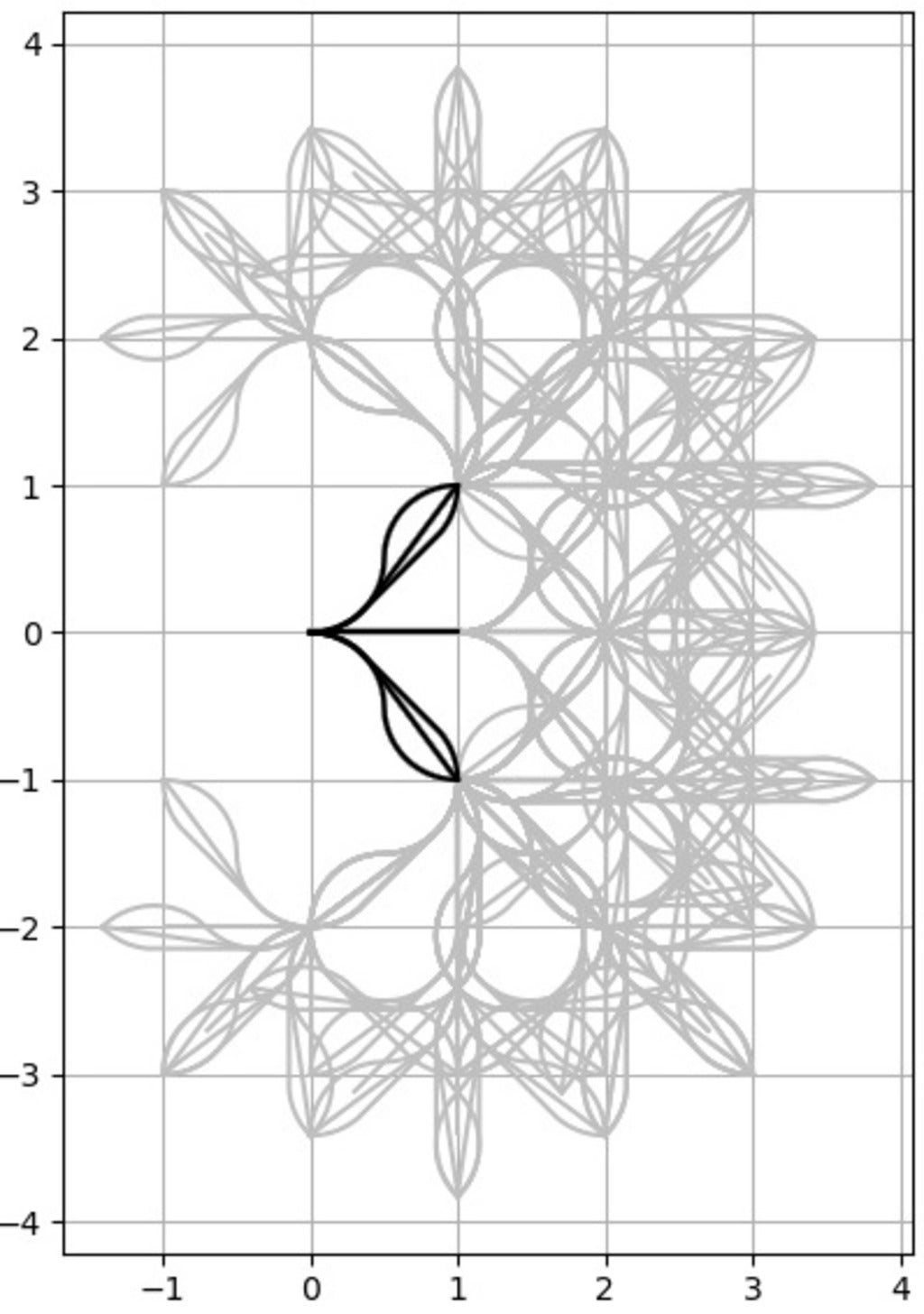
A set of motion primitives t-span a state lattice if, given a real number t greater or equal to one, any configuration in the lattice can be reached via a seque
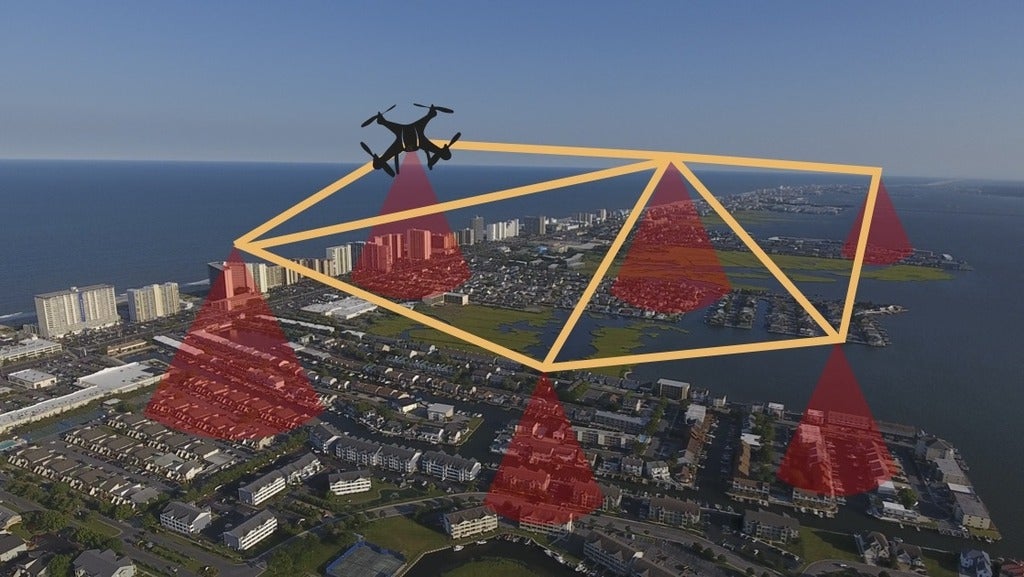
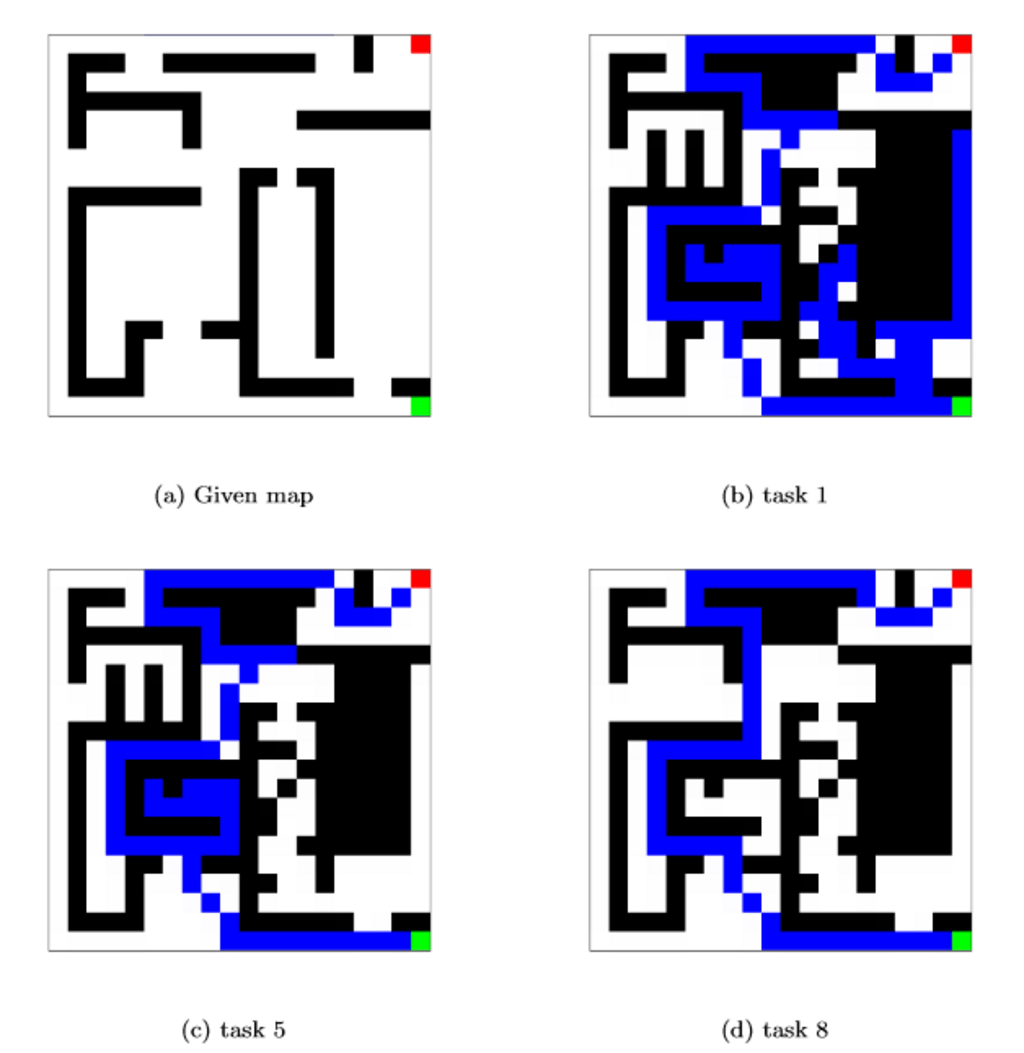
This project focuses on finding patrolling paths for a team of multiple autonomous robots that are persistently monitoring a large environment to detect events occurring at locations of the environment.
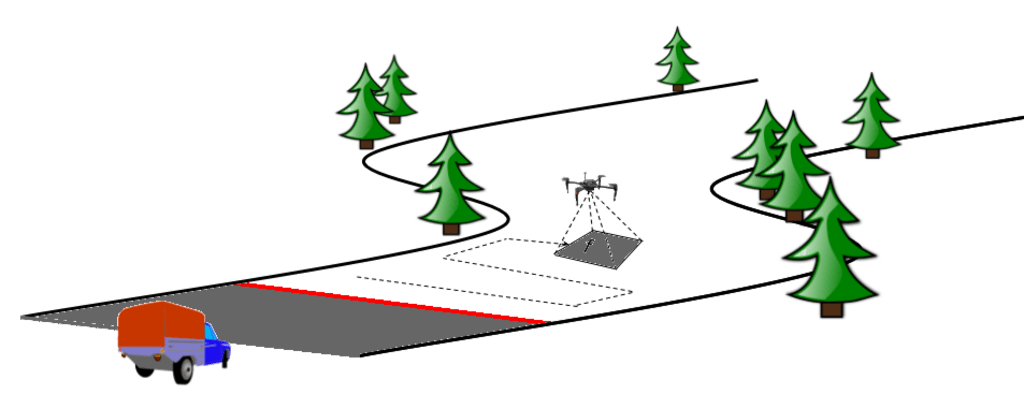
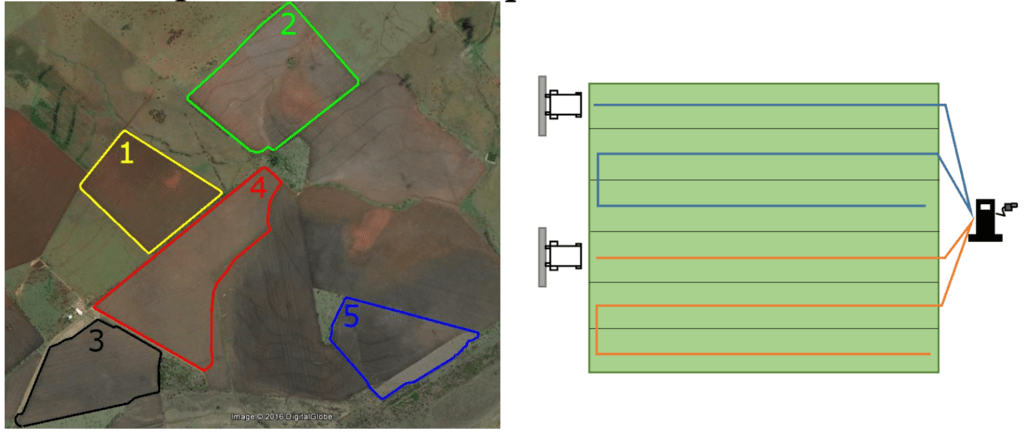
This project investigates cooperative coverage planning using a unmanned aerial vehicle and a ground vehicle.