This project involves the development of models of naturalistic human driving behaviour in order to test, validate, and verify behaviour planners of autonomous vehicles
Human driving behaviour is rich and complex, and it is challenging to create usable models that are reflective of the way humans drive in different traffic situations. In this project, we work towards adapting models based on different paradigms, such as behavioral game theory, behaviour trees, etc. to create mathematical models that can capture the wide range of human driving behaviour observed in traffic.
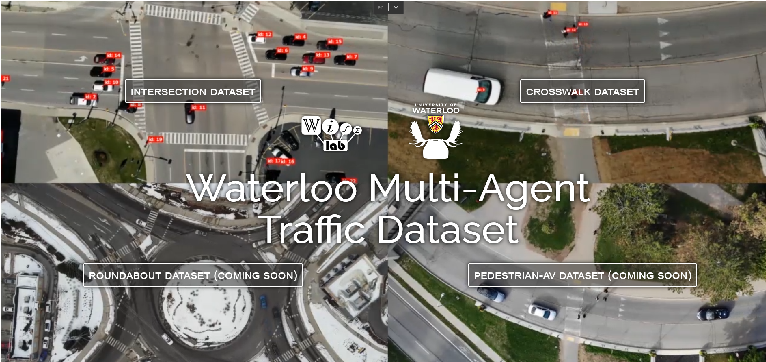
Datasets:
The models created as a part of this project are based on naturalistic driving data. The Waterloo Multi-Agent Traffic Dataset is part of that effort, and is publicly available at: http://wiselab.uwaterloo.ca/waterloo-multi-agent-traffic-dataset/
Focus areas
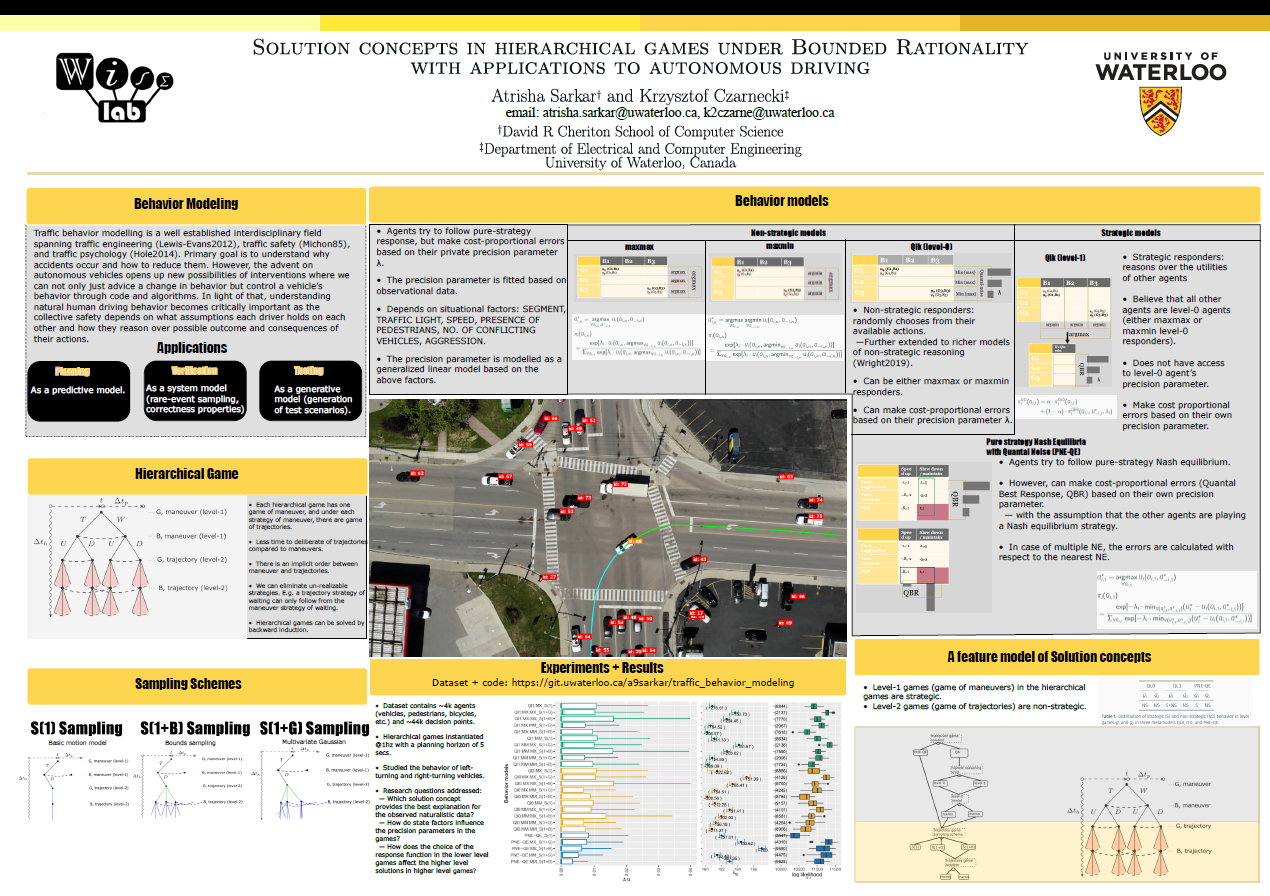
Behavioral game theory:
Behavioral game theory extends the standard game theoretic framework to take into account human psychology and interactive decision making based on empirical observations.
-
Connecting
hierarchical
games
with
behavioral
game
theory:
In
this
work
we
investigate
the
use
of
solution
concepts
from
behavioral
game
theory
for
modeling
human
decision
making
in
busy
traffic.
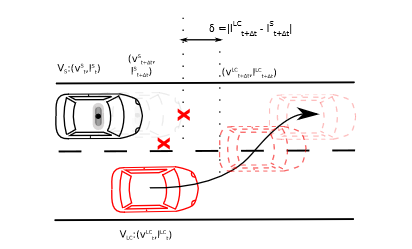
- Rare-event sampling: Accidents are rare and typical datasets on naturalistic data do not contain such adverse events, and therefore, there is a need for models of such edge case scenarios for testing and verification of autonomous vehicle planners. In this project we show that a simple utility driven decision theoretic approach can be used for efficient sampling of rare event situations in traffic.
Opportunities
We are looking for postdocs and graduate students interested in working on all aspects of autonomous driving.
For more information, visit Open positions.