We are implementing a simulator for WISE Automated Driving System (ADS). The simulator is based on UnrealEngine 4.21.

Main features:
- Lincoln MKZ "UW Moose" high-fidelity, 14 degrees of freedom vehicle model (suspension and hybrid powertrain)
- Dataspeed interface to the vehicle model
- Velodyne VLP32-C and HDL64-E lidar simulation
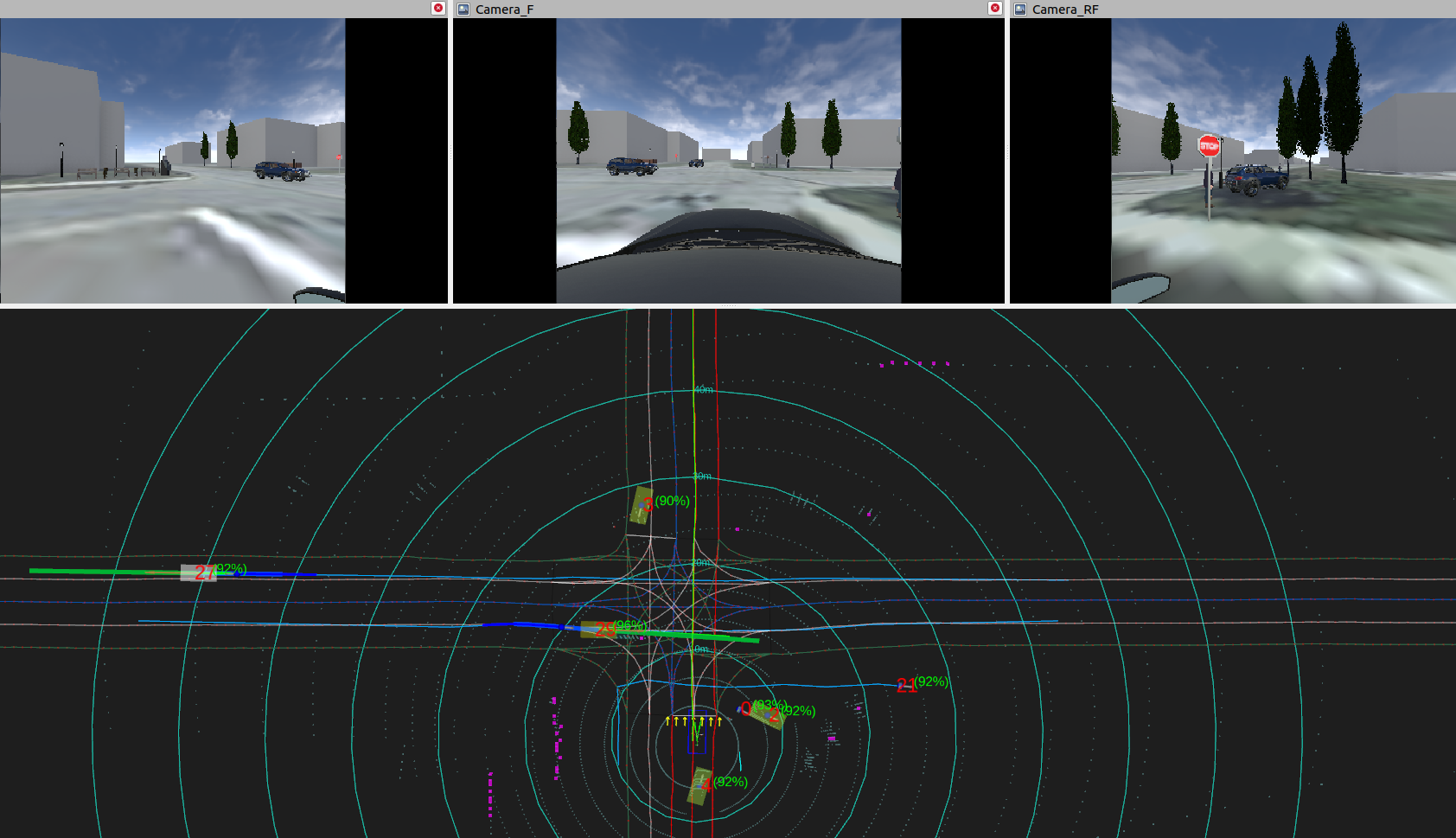
- Camera simulation with max 1280x1024 resolution (left front, front center, and right front cameras)
- GeoScenario 1.1 support for scenario definition and execution
- Desktop simulation (both simulator and AV software on desktop) and mixed-reality simulation (both simulator and AV software on the car).
- Efficient UnrealEngine to ROS integration (direct memory instead of binary serialization and socket communication)
- Headless mode for continuous integration scenario execution
Videos
Click with ctrl to open in a new tab
About the simulator
- Launching the simulator, slaunch explained in detail (old)
- Launching the simulator with rqt, rviz, inspecting the system explained (new)
- Lidar and camera configuration
- Performance diagnostics
Example application of WISE ADS / WISE Sim mixed-reality scenario testing mode in research
How UW Moose was used to create a self-driving platoon
Videos of example scenarios
All videos show automated driving except where explicitly indicated as "manual driving".
- Colby intersection (simulation) (mixed reality, manual driving)
- Ring road with a large pedestrian group (simulation)
- Traffic jam assist (simulation)
- Left turn at stop with occlusion (simulation) (mixed reality)
- Bathurst busy intersection (simulation)
- Shows ground-truth detected objects, detected objects with perception delay, occlusions, and range, and object tracking
Example scenario definitions
Definitions of the scenarios from paper "Modes of Automated Driving System Scenario Testing: Experience Report and Recommendations" are available from the repository modes-of-ADS-scenario-testing-scenarios.
Trying the WISE Sim simulator with the WISE Automated Driving System (ADS)
For instructions, see the README in the repository wise-sim-scenarios.
To run the ADS and WISE Sim inside a docker container, see wise-sim-docker.
Publications
2020
2019
Opportunities
We are looking for postdocs and graduate students interested in working on all aspects of autonomous driving.
For more information, visit Open positions.