What is WISE Drive?
WISE Drive is a framework for analyzing and specifying driving behavior requirements on ADS-operated vehicles. Other uses include
- creation of simulation, closed-course, and field test scenarios for development and certification;
- specification of the operational design domain (ODD) for an ADS; and
- labeling and analysis of driving data.
We use WISE Drive to specify the driving behavior and assure the safety of Autonomoose—our automated driving software stack, and for its public road testing on the UW Moose.

What are the key elements of WISE Drive?
Driving behavior requirements are constraints on the driving behavior of the ADS-operated vehicle within the road environment.
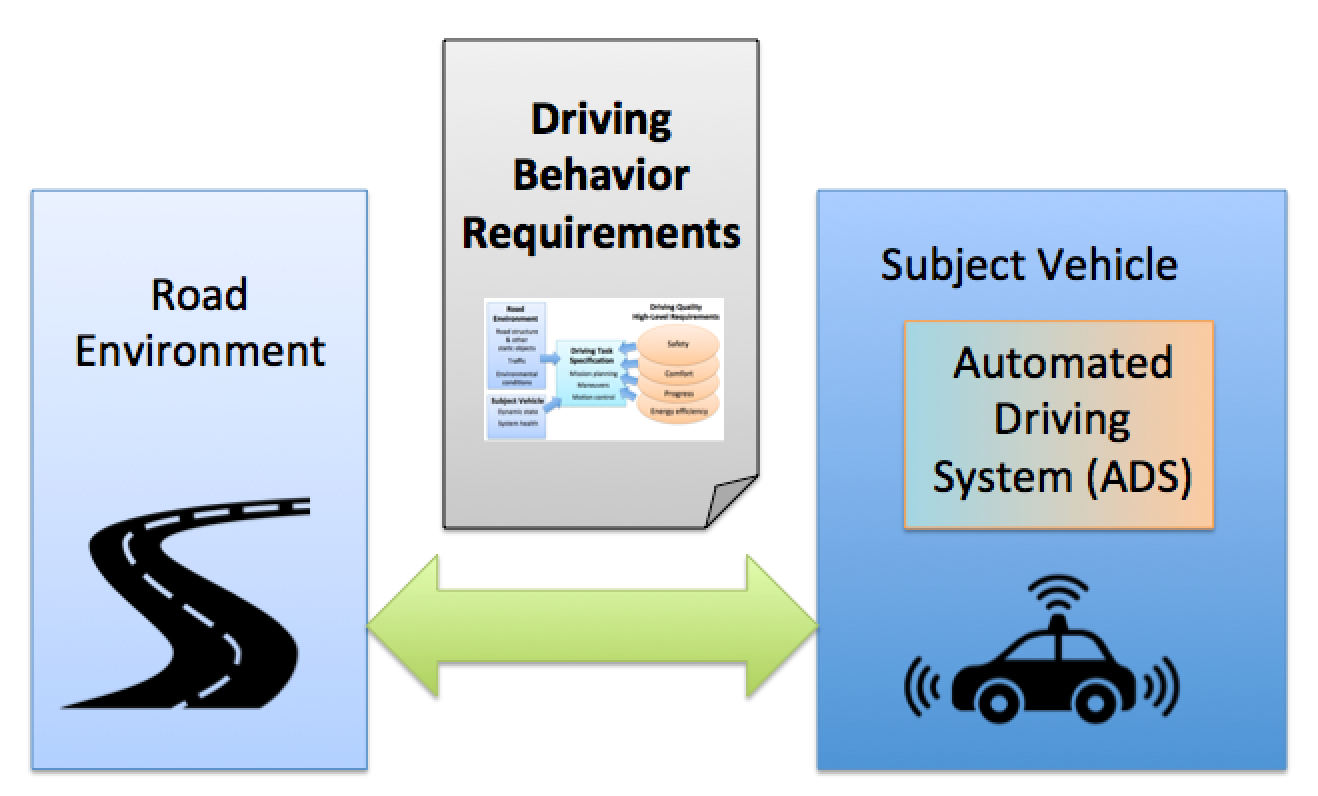
WISE Drive provides concepts and methods to analyze and specify
- the Dynamic Driving Task (DDT),
- the road environment, and
- driving qualities.
Driving Task Specification
Driving behavior is commonly abstracted, temporally and spatially, into three levels [Michon 1985]:
- strategic: mission planning (hours; trip-level),
- tactical: maneuvers (seconds; lane-level), and
- operational: motion control (milliseconds; centimeter-level).
The operational level consists of basic motion control tasks:
- longitudinal control, including acceleration, deceleration, and speed maintenance, and
- lateral control, including straight driving, cornering, and swerving.
The tactical level consists of structured-road maneuvers, which are tactical driving tasks for roads with lane structure. They are classified into
- primary maneuvers, which include lane maintenance; lane changing; and swerves and turns out of and into a lane; and
- secondary maneuvers, including passing and overtaking; handling intersections; handling pedestrian, cyclist, and railway crossings; and joining and leaving traffic.
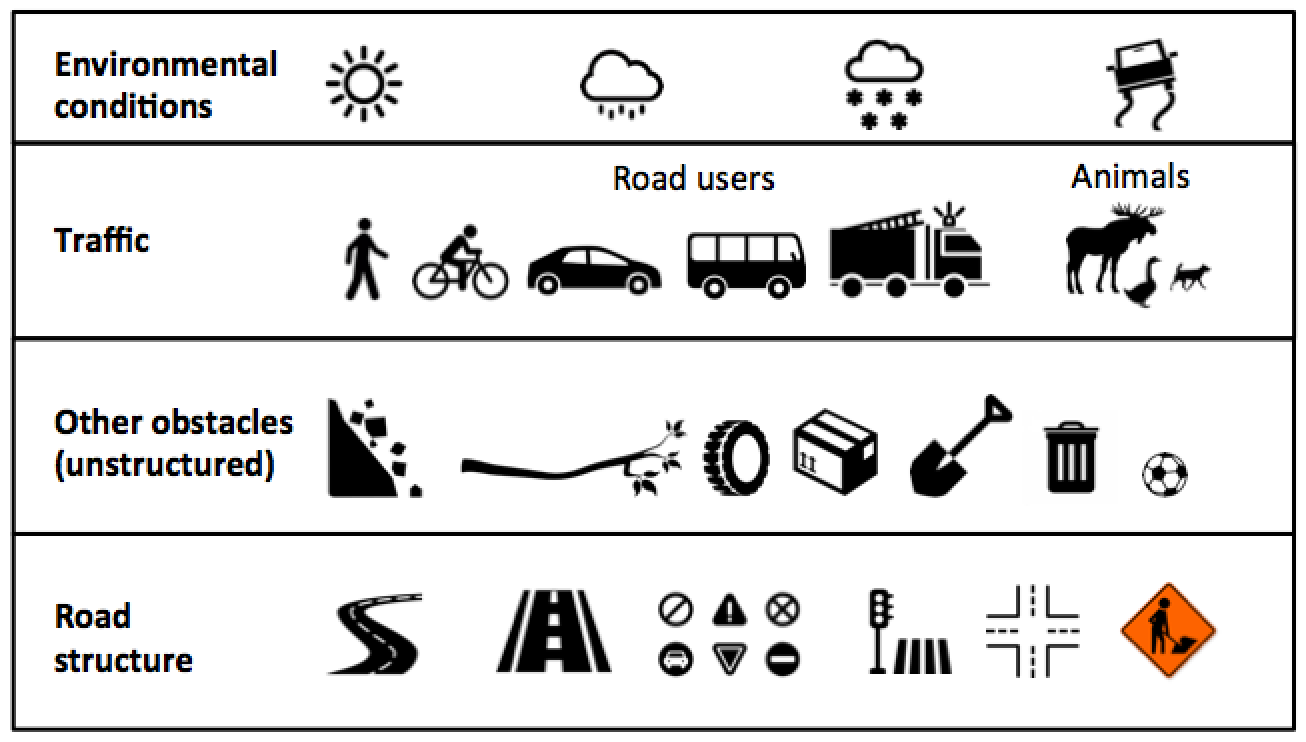
Road Environment Ontology
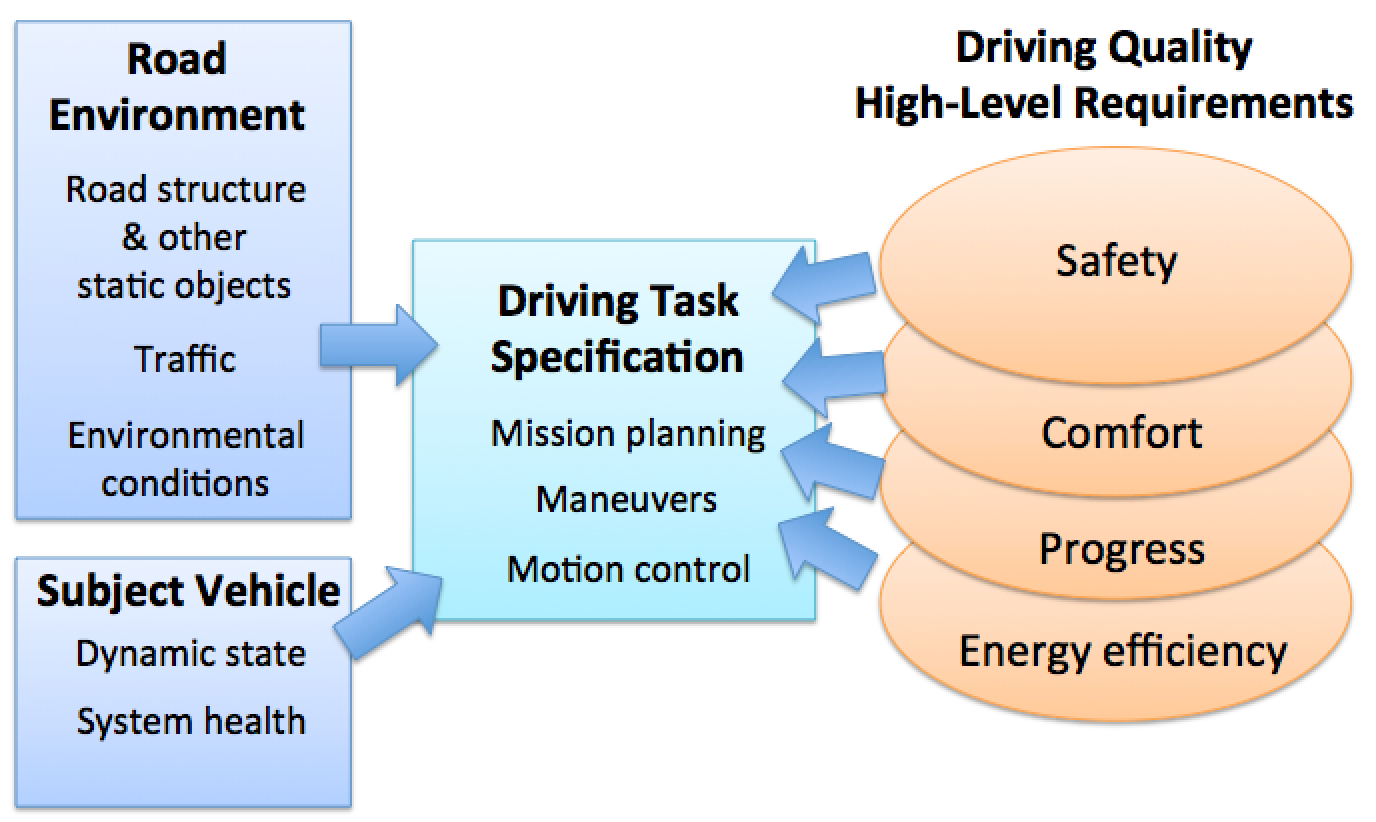
The operational world ontology defines the elements and conditions of the road environment. Each maneuver varies depending on the applied behavior modifiers, which are the road-environment elements and conditions to which the subject vehicle may need to respond.
Driving Quality Requirements
Basic motion control tasks and maneuvers are subject to driving quality requirements:
- safety,
- comfort,
- progress, and
- energy efficiency.
Driving Behavior Safety
Driving behavior safety is the absence of unreasonable risk from crashes due to hazards caused by deficiencies in the specified driving behavior. To this end, the specified behavior must satisfy driving behavior safety requirements, which this framework classifies into five categories:
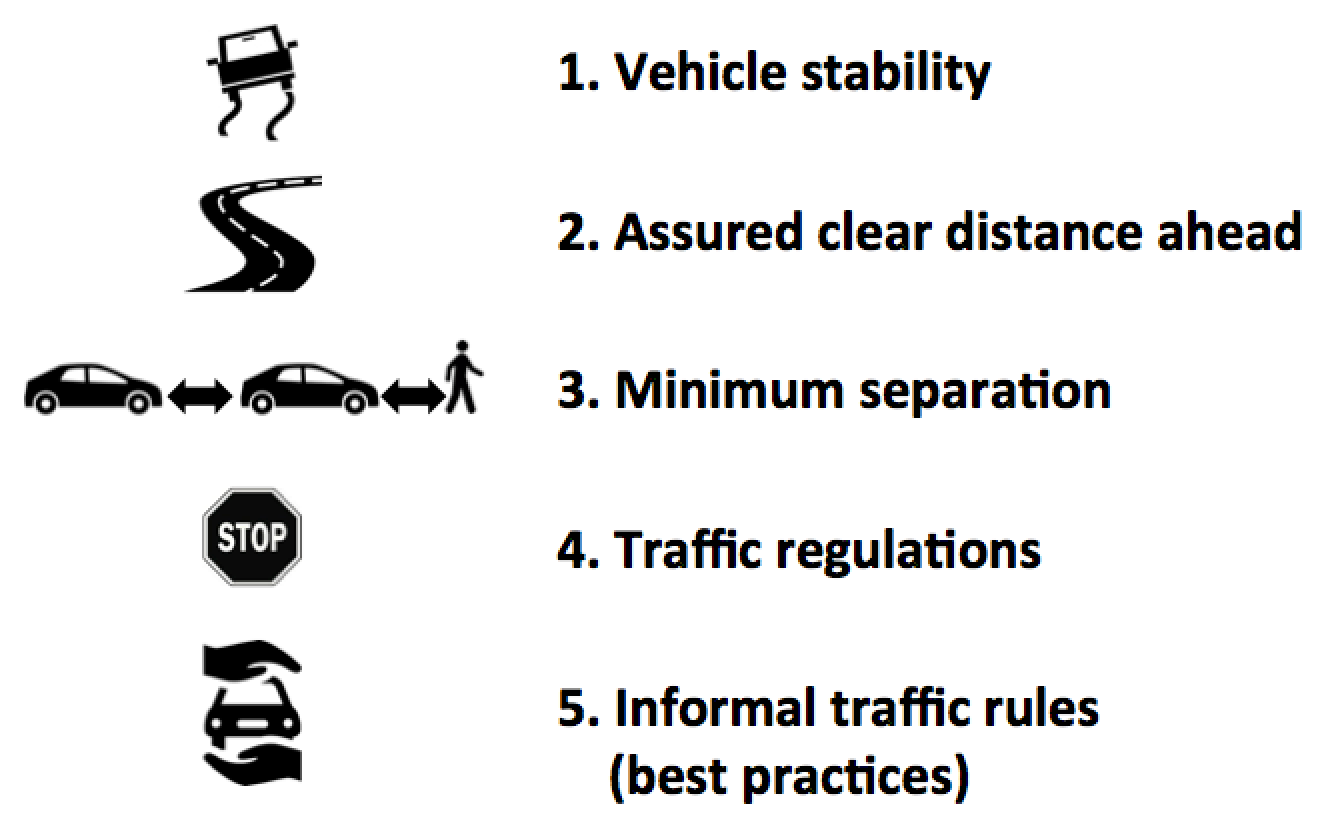
The driving behavior safety requirements originate from human driving, but were adapted to automated driving in mixed traffic.
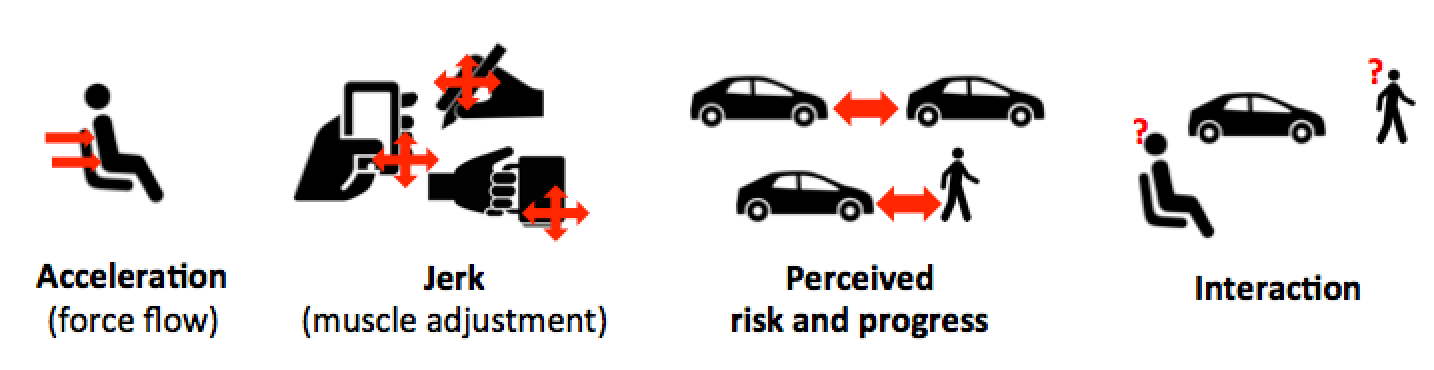
Driving Behavior Comfort
Driving behavior comfort includes both occupant comfort and other road user comfort. Acceleration and jerk are main driving parameters impacting occupant comfort. Additionally, speed and gap choices impact occupant and other road user comfort in terms of balancing perceived risk and perceived progress. The framework summarizes existing data relating acceleration and jerk to comfort, and uses comfort zone concept for speed and gap choices related to comfort.
WISE Drive Documentation
WISE Drive comes with comprehensive documentation (over 350 pages) available from this page.
All eight documents in two zip archives: zip1, zip2
Driving Task Specification
Maneuver Catalog
K. Czarnecki. Automated Driving System (ADS) Task Analysis – Part 2: Structured Road Maneuvers. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.23280.76800
Basic Motion Control Task Catalog
K. Czarnecki. Automated Driving System (ADS) Task Analysis – Part 1: Basic Motion Control Tasks. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.29991.65447
Road Environment Specification
ODD Taxonomy
K. Czarnecki. Operational Design Domain for Automated Driving Systems – Taxonomy of Basic Terms. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.18037.88803
Road Structure Ontology
K. Czarnecki. Operational World Model Ontology for Automated Driving Systems – Part 1: Road Structure. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.15521.30568
Road Users, Animals, Other Obstacles, and Environmental Conditions Ontology
K. Czarnecki. Operational World Model Ontology for Automated Driving Systems – Part 2: Road Users, Animals, Other Obstacles, and Environmental Conditions. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.11327.00165
Driving Quality Requirements
Driving Behavior Safety
K. Czarnecki. On-Road Safety of Automated Driving System – Taxonomy and Safety Analysis Methods. WISE Lab, University of Waterloo, 2017, DOI: 10.13140/RG.2.2.28313.93287
K. Czarnecki. Automated Driving System (ADS) High-Level Quality Requirements Analysis – Driving Behavior Safety. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.13214.43846
Driving Behavior Comfort
K. Czarnecki. Automated Driving System (ADS) High-Level Quality Requirements Analysis – Driving Behavior Comfort. Waterloo Intelligent Systems Engineering Lab (WISE) Report, University of Waterloo, 2018, DOI: 10.13140/RG.2.2.19925.32483
What’s next?
You are free to use this material for your development and testing efforts, as long as you acknowledge the source of this information. The material is provided as-is and with no warranties. Liability for all uses of this material is disclaimed.
We are interested in feedback and would also be happy to collaborate on efforts that build on this framework. Feel free to contact us at krzysztof.czarnecki@uwaterloo.ca, with “WISE Drive” in the subject line.
We are looking for postdocs and graduate students interested in working on all aspects of autonomous driving.
For more information, visit Open positions.