Occlusion Scenario Generation
This project is based around the automatic generation of dangerous occlusion scenarios which can be used to test the performance of autonomous driving systems (ADS).
Validating the robustness of ADSs to safety-critical dynamic occlusions is a difficult task due to the rarity of such scenarios in recorded driving logs. We provide a novel typology of dynamic occlusion scenarios involving vehicles, as well as a framework for the generation of a diverse set of dynamic occlusion-caused collisions (OCCs) across a wide variety of intersections. We provide results demonstrating that our technique achieves higher generation efficiency and diversity of OCCs than prior works while being applicable to a wide range of intersections.
Simulator, Dataset, and Planners
We make extensive use of the nuPlan simulator in our work. It is a lightweight, extensible platform for evaluating motion planners. In addition to adapting the simulator to our needs, our work makes use of nuPlan's extensively labelled dataset of on-road scenarios, collected by driving a vehicle with multiple cameras and LiDAR sensors for 1500 hours across Las Vegas, Pittsburgh, Boston, and Singapore.
Our agents are controlled by the PDM-Closed model of tuPlan, which performed best in the closed-reactive portion of the 2023 nuPlan challenge.
A bird's eye overview of the nuPlan HD map of south Boston. Credit: Motional.
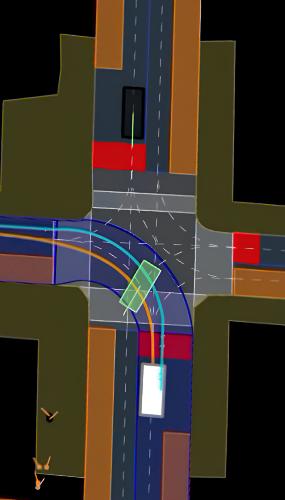
An example of a generated OCC within the nuPlan Simulator
Dynamic Occlusion Typology
We present a novel typology for categorizing dynamic occlusions, dependent on two factors. The relative positioning of the two conflict vehicles, and the positioning of the occluding vehicle relative to the two conflict vehicles. We design automatic scenario generators for each of the blue highlighted conflict types depicted in the dynamic occlusion pattern chart on the right.
OCC Generation
Our dynamic occlusion generation system shares many similarities with prior work. We inject vehicles into recorded scenarios to create dynamic occlusions. We then filter these scenarios twice by first running them with occlusions, and then running them without occlusions, leaving only scenarios where occlusions are the cause of a collision. A key difference in our approach is that, unlike prior work, we don't just inject the occluding vehicle. We also inject the conflict vehicle to increase the likelihood of generating a collision. The injection of occluder and conflict vehicles is guided by our systematic occlusion typology.

Arrows represent relative vehicle movements. A circled arrowhead denotes the occluder. The remaining two arrowheads denote conflict vehicles. An arrowhead terminated by a bar indicates a stopped vehicle. The highlighted columns are conflict types that we create specific scenario generators for.
Image

Pictured here is our dual filter system. By filtering twice, we aim to only retain generated scenarios where occlusion is the cause of a collision.
I Know You Can't See Me
Prior work done in this lab on occlusion generation was headed by Maximilian Kahn.
A particular challenge for both autonomous and human driving is dealing with risk associated with dynamic occlusion. Together with Atrisha Sarkar, Maximilian Kahn developed a novel multiagent dynamic occlusion risk (DOR) measure for assessing situational risk in dynamic occlusion scenarios based on the theory of hypergames. They then presented a white-box, scenario-based, accelerated safety validation framework for generating critical dynamic occlusion scenarios and assessing the safety of autonomous driving strategic planners.
Publications
- Dykhne, Henry Eli, "Automated Generation of Dynamic Occlusion-Caused Collisions", MMath, 2024.
- Thesis presentation video - Kahn, M., Sarkar, A., Czarnecki, K. (2022). I Know You Can't See Me: Dynamic Occlusion-Aware Safety Validation of Strategic Planners for Autonomous Vehicles Using Hypergames.. I Know You Can’t See Me: Dynamic Occlusion-Aware Safety Validation of Strategic Planners for Autonomous Vehicles Using Hypergames. Retrieved from https://arxiv.org/abs/2109.09807
- Kahn, M., "Dynamic-Occlusion-Aware Risk Identification for Autonomous Vehicles Using Hypergames", MMath thesis, 2021.
- Thesis presentation video