
We are implementing a simulator for WISE Automated Driving System (ADS). The simulator is based on UnrealEngine 4.21.
Main features:
We are implementing a simulator for WISE Automated Driving System (ADS). The simulator is based on UnrealEngine 4.21.
Main features:
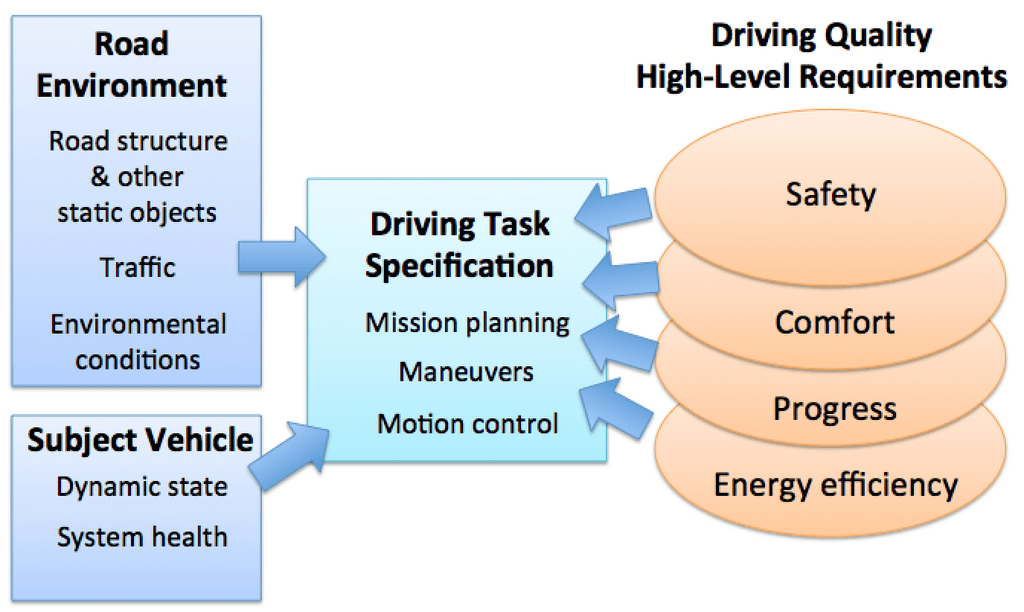
WiseMove is a modular safe deep reinforcement learning framework for motion planning, combining hierarchical learning and temporal logic constraints.
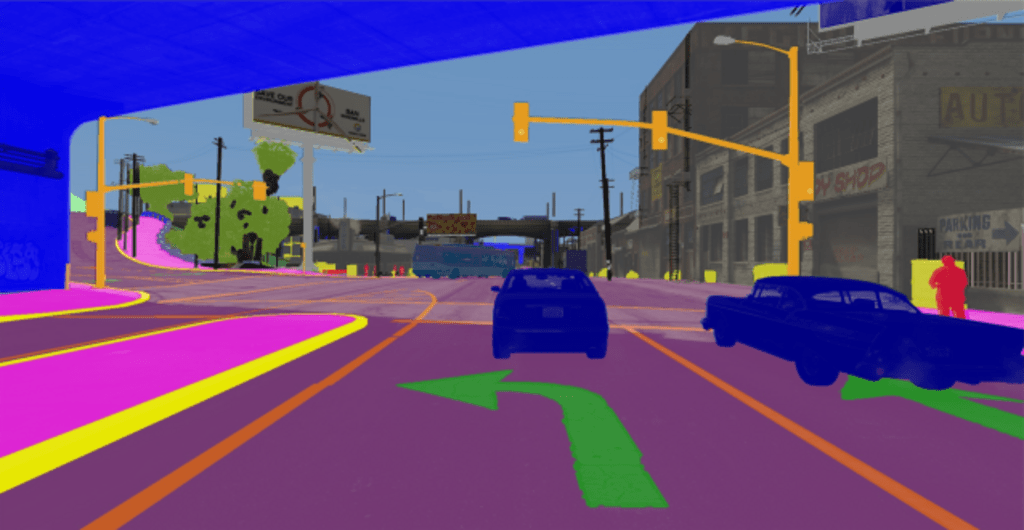
Abstract. In training deep neural networks for semantic segmentation, the main limiting factor is the low amount of ground truth annotation data that is available in currently existing datasets. The limited availability of such data is due to the time cost and human effort required to accurately and consistently label real images on a pixel level. Modern sandbox video game engines provide open world environments where traffic and pedestrians behave in a pseudo-realistic manner. This caters well to the collection of a believable road-scene dataset.
What is WISE Drive?

"Autonomoose" is a collaboration between WISE Lab and WAVE Lab to build the University of Waterloo's self-driving research platform. The result is the "UW Moose" the first self-driving car built in Canada to drive on public roads.
See a video of our first automated drive on public roads in Waterloo in Dec 2017.
See a video of our 100 km public drive in Waterloo in Aug 2018.
For more information, visit the official website: http://autonomoose.net
Clafer is a lightweight structural and behavioral modeling language.
More more information, visit the new official website: clafer.org