The leg and knee play crucial roles in the body.
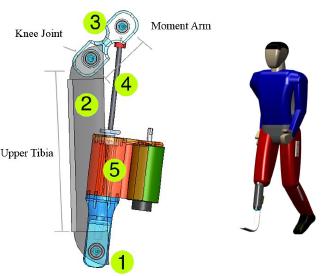
The leg contributes to keep the body balanced and supported while standing up. The knee locomotion joins the upper and lower legs together and provides the bending motion that allows us to walk.
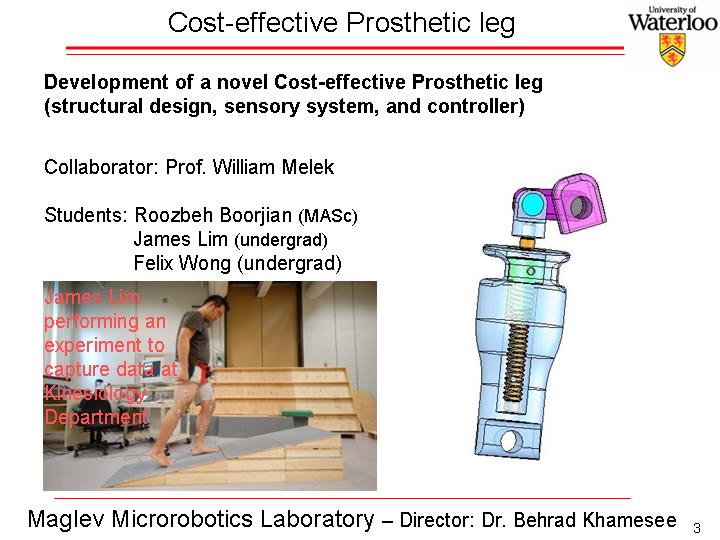
The few microcontroller based active/semi-active prosthetic knee joints available commercially, such as Otto Bock's prosthetic C-Leg, are extremely expensive and do not consider the uncertainties of the input sensory information. Therefore, they are only affordable by a few, and despite their high cost, they suffer from sensitivity to input uncertainty which could impact their performance. Hence, the motivation of this research is to design a cost-effective Active Prosthetic Knee (APK) with modular control/sensing architecture. The drive mechanism of the APK should be simple to enable easy maintenance and high robustness.