



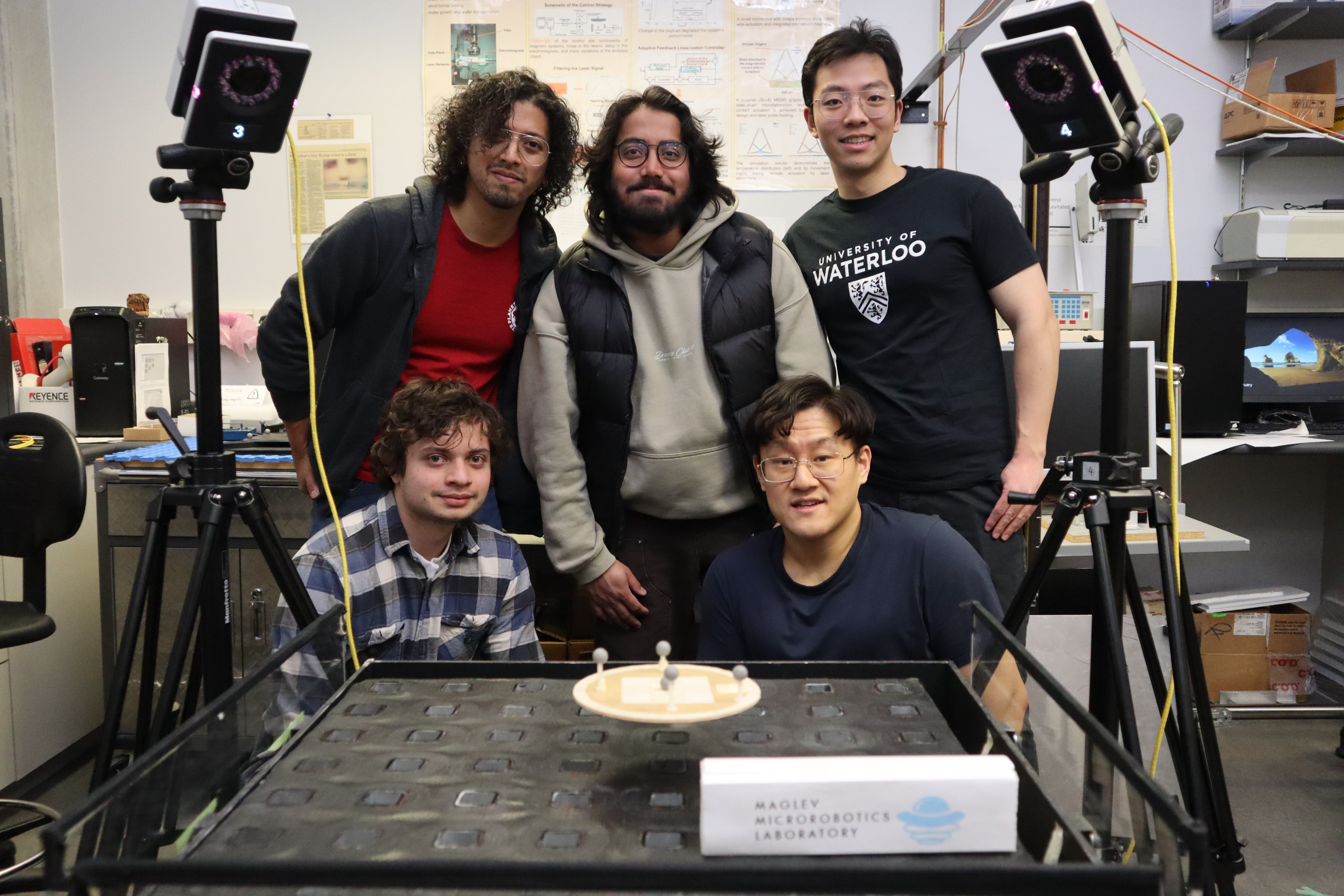
Maglev Microrobotics Laboratory studies the design and development of magnetically levitated (Maglev) robots. To accomplish this, a magnetic levitation setup enabling high precision 3D remote positioning was built.
Our Maglev systems find applications in areas spanning various disciplines such as:
- Contactless micromanipulation and microrobotics
- Manipulation in hazardous environment
- Clean rooms applications
- Wind tunnel testing
- Wafer growth and wafer transportation
We are working on the development and industrialization of various applications of magnetism such as electromagnetic energy harvesters and non-destructive testing for detecting cracks and defects in live pipelines.
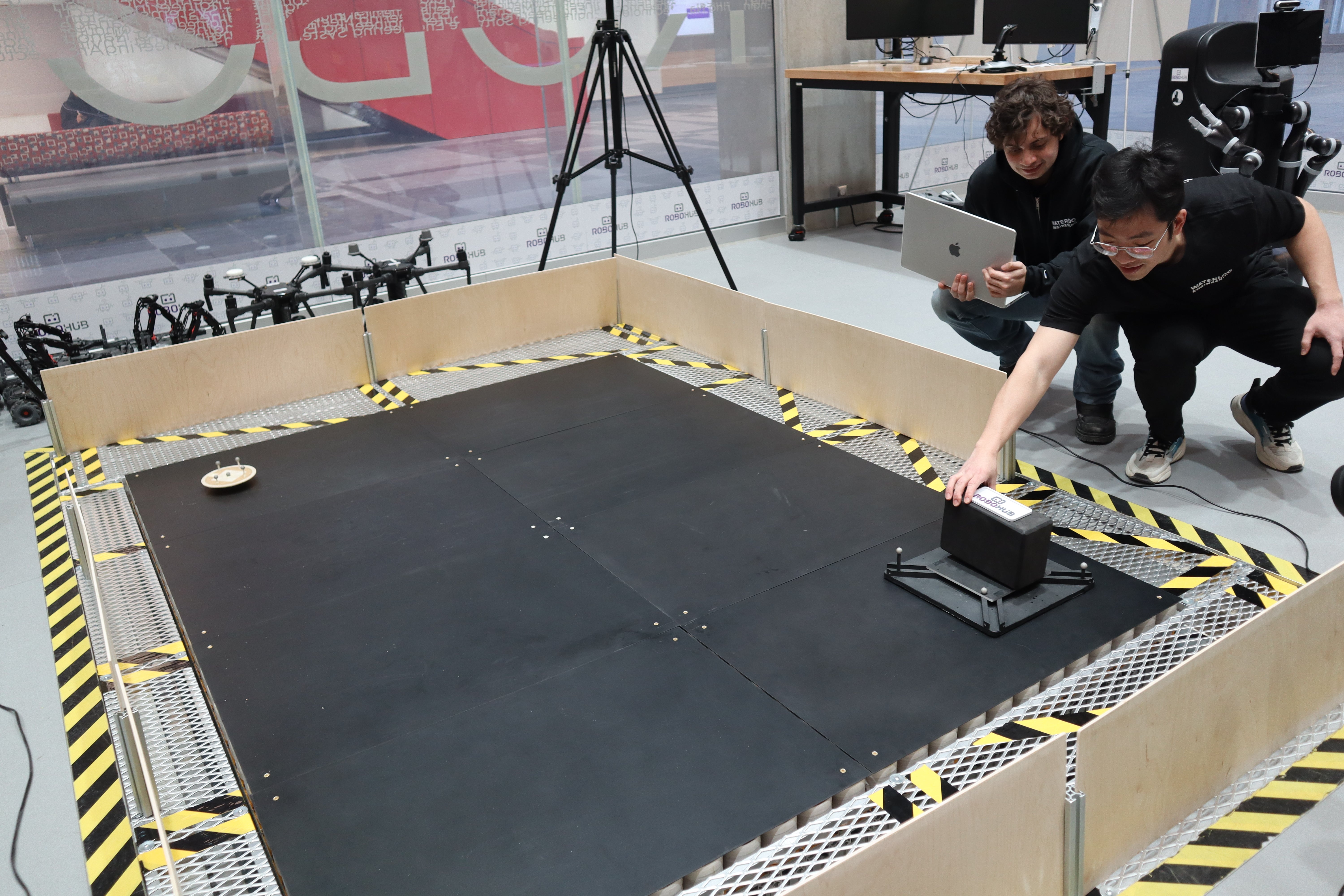
Dr. Khamesee is a Co-PI in the development of Robohub in PSE building. Research on Magnetic Levitation Floor is currently being conducted in Robohub!
Current Projects

2026 RoboHub Spring Symposium for Human-Centered Robots







ANNOUNCEMENT
PhD and MASc positions are open.
An immediate PhD position is available. The applicant must already be in Canada to expedite the paperwork process.

Lab Location: E5-3044
Engineering 5 building, 3rd Floor
Our stories
Charge your phone while you shovel - and shiver [Waterloo Stories]

What makes it different is that it’s a single unit unlike other multi units that have been developed.
News
Biomedical Engineering and Technology Research Day 2024
Afarin Khabbazian, a MASc student from our laboratory, presented her research with the poster title: "Magnetically actuated soft robots for applications in the urinary tract" in the Poster Showcase session at Biomedical Engineering and Technology Research Day on July 24, 2024.

MARSS 2024: International Conference on Manipulation, Automation and Robotics at Small Scales
Afarin Khabbazian, a MASc student from our laboratory, is selected as a nominee for best student paper awards at the International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS2024), with a paper titled: "Magnetic actuation of small-scale soft robots".

SOMMeRS 2023: Southern Ontario Medical MicroRobotics Symposium
Dr. Behrad Khamesee was invited as a flash talk speaker in the session on Magnetically levitated mirorobots for micromanipulation and biomedical applications at SOMMeRS 2023 on Tuesday, July 11, 2023.
Joseph Nofech and Afarin Khabbazian, two MASc students from our laboratory, also participated in poster presentation.