Learning-based model predictive control
Model predictive control (MPC) schemes rely on a sufficiently accurate prediction model of the system. Traditional physics-based MPC methods are facing a huge challenge of modelling uncertainties of vehicle dynamics, e.g., road conditions, aging of tires, etc. In recent years, machine learning techniques have been proved successful in many application domains, including vehicle control systems.
The integration of machine learning with MPC in the form of learning a prediction model, controller design, or even the control law directly, provides the controller the ability of learning from previous valuable vehicle data/experience resulting in improved vehicle control systems.
Our main objectives in learning-based MPC (LBMPC) for vehicle control are:
- Improving the control performance by learning while safety is still guaranteed
- Exploring a variety of machine learning techniques within LBMPC frameworks
- Creating effective data/experience collection, analysis, and management strategies for learning
- Stability analysis of LBMPC
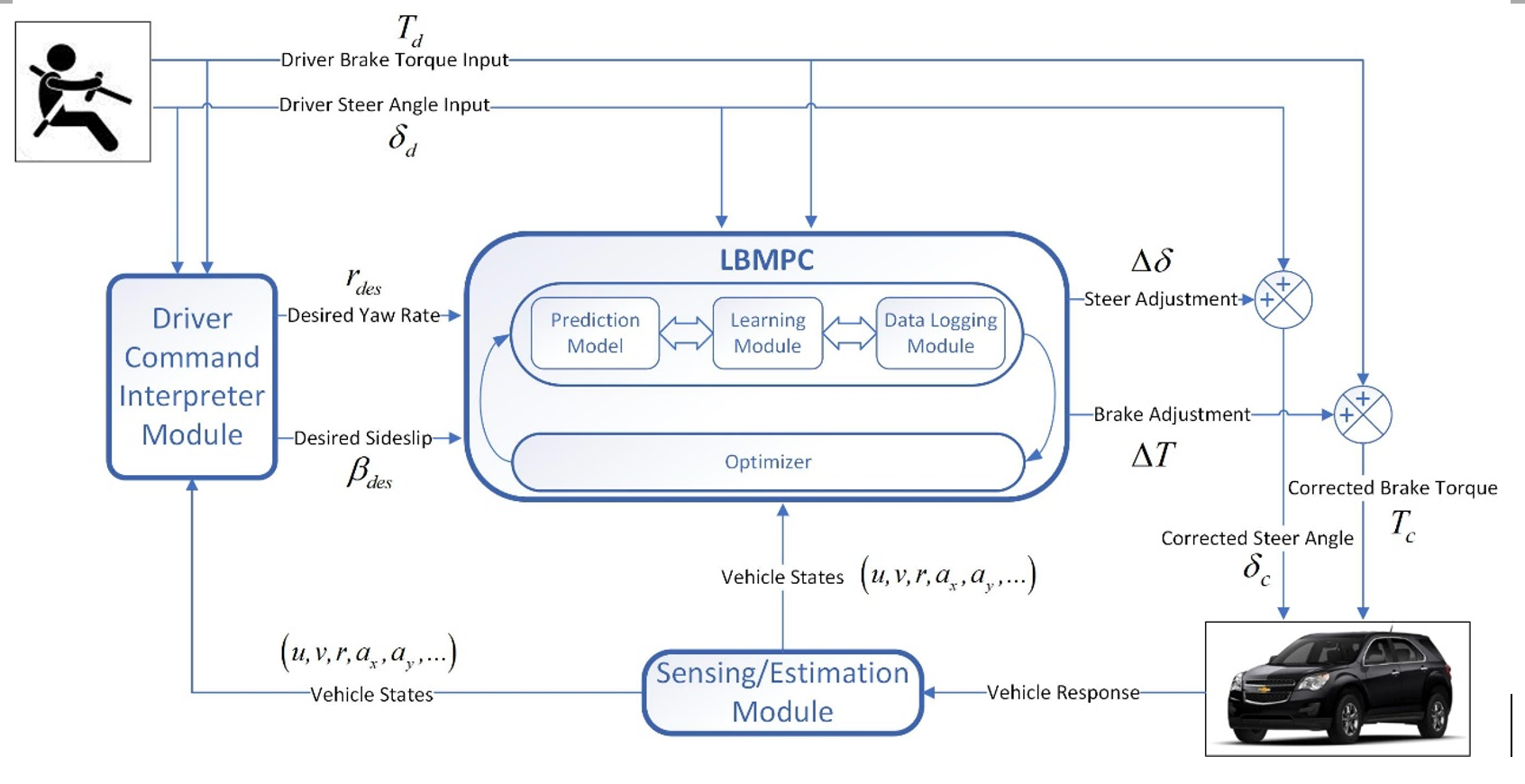
As the diagram above shows, the LBMPC controller receives the desired yaw rate and vehicle sideslip angle from a Driver Command Interpreter (DCI) module as the tracking references. DCI calculates the desired vehicle responses based on the driver inputs and measured or estimated vehicle states. Using the LBMPC scheme, the controller calculates the optimal steer angle adjustment and yaw moment to achieve the desired vehicle response. Results have shown that the control performance of LBMPC outperforms that of a traditional MPC due to its capability of learning from experience.