Background
Virtual 3D manipulation of computer generated representations (e.g. in CAD software applications) or robotic control (e.g. surgical devices) is a challenging task in computer control environments that rely on standard input devices such as a keyboard, mouse, joystick, etc. Many such applications require the use of two input devices where less frequently activated functions are allocated to input from a device controlled by the user’s non-dominant hand. Unfortunately almost all non-dominant hand input devices to date are somewhat cumbersome and require a high degree of user experience and dexterity in order to master 3D orientation manipulations in a time efficient manner.
The results of studies conducted by Waterloo researchers have contributed to the understanding of the usability and performance limitations of current commercial 3D input devices. Based on this understanding, Waterloo researchers have developed a 3D input device called VeBall that changes its form factor (physical shape) in order to separate 2D interactions for translation of objects from the 3D interactions associated with rotating an object using 6 degrees of freedom. VeBall not only outperforms commercially available 3D input devices but also can work as both a desktop and a free-space device (in contrary to other devices that are designed to be just desktop devices). The invention of the VeBall is based on the integration of separate functionality with a change in the form factor of the device housing.
Description of the invention
Waterloo researchers have developed a 3D input device that allows CAD users to easily perform complicated 3D manipulations with their non-dominant hand. This device is capable of performing both 2D and 3D operations required in CAD software applications and/or robotic control. This Waterloo-invented input device called VeBall (Virtual Environment Ball) has been tested against most popular 3D input devices and outperformed them in terms of task completion time and user performance. Multiple form factors of the invention are possible i.e. VeCone, VeCylinder.
Advantages
The invention allows more efficiency for CAD users during 3D/2D manipulations by non-dominant hand. The wireless version of the device is feasible with the emergence of more advanced battery technologies. Haptic feedback can be embedded into the device to enable certain features and applications.
Potential applications
- Non-dominant hand input device for CAD and robotic control applications
- Medical rehabilitation
- Interactive entertainment/education for young children
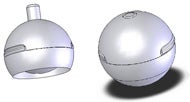
VeBall in:
2D mode (truncated sphere)
3D mode (full sphere)

VeBall as a non-dominant-hand input device
Reference
8810-7205
Inventors
Carolyn MacGregor
Rex Fang Xu
Patent status
US patent 8,199,107 issued
Stage of development
Working prototype
Contact
Scott Inwood
Director of Commercialization
Waterloo Commercialization Office
519-888-4567, ext. 43728
sinwood@uwaterloo.ca
uwaterloo.ca/research