Design team members: Andrew Cameron and Peter Lobsinger
Supervisors: Dr. Glenn Heppler
Background
The Waterloo Rocketry Team is currently building a rocket to compete in the 2011 Intercollegiate Rocket Engineering Competition, for which they hope to use a small hang-glider as a payload. The glider has been designed by Mechanical Engineering student Gandhali Joshi.
Project description
It is our intent to build an automatic controller for it so that it will safely fly itself back to the ground without external guidance.
By not requiring external guidance, the aircraft can operate at distances over which radio communications are difficult or infeasible, and eliminates operator error from consideration.
Design methodology
The design objectives are threefold: to maintain stable flight in face of minor disturbances (e.g. wind), to fly to a target, and to survive the landing so that the craft may be reused.
To achieve this, an aerodynamic model is being developed in order to describe the craft’s motion. A path-planning and autonomous control scheme is also being developed in conjunction with the model to leverage the aerodynamics provided by the model in order to guide the craft as desired.
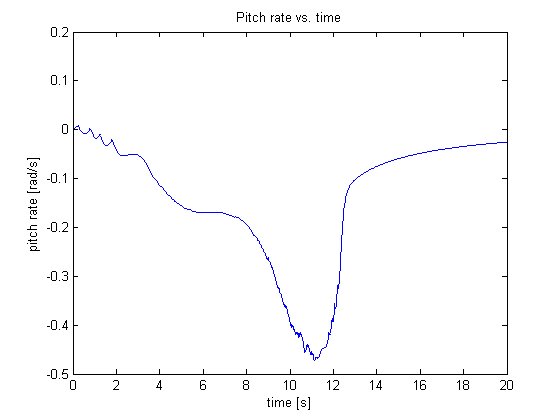
Numerical simulations incorporating a broad spectrum of conditions are being used to validate the design process until such a time as a physical prototype can be built and measured for real-world parameters. One result of such a simulation can be seen below, demonstrating both high-frequency and low-frequency craft instabilities.