Along with the dedicated infrastructure in the RoboHub facility itself, we have a diverse, globally unique fleet of robots, offering a wide array of different capabilities all coordinated via a custom Robot Operating System (ROS) based communications network.
RoboHub's fleet consists of fixed-base, walking, rolling, and flying robots, including a full-size humanoid, several unmanned aerial and ground vehicles (UAVs and UGVs), a single- or dual-armed mobile manipulator, and many collaborative robot arms.
For details on some of these robots, check the highlighted profiles below or check out the complete list of robots.
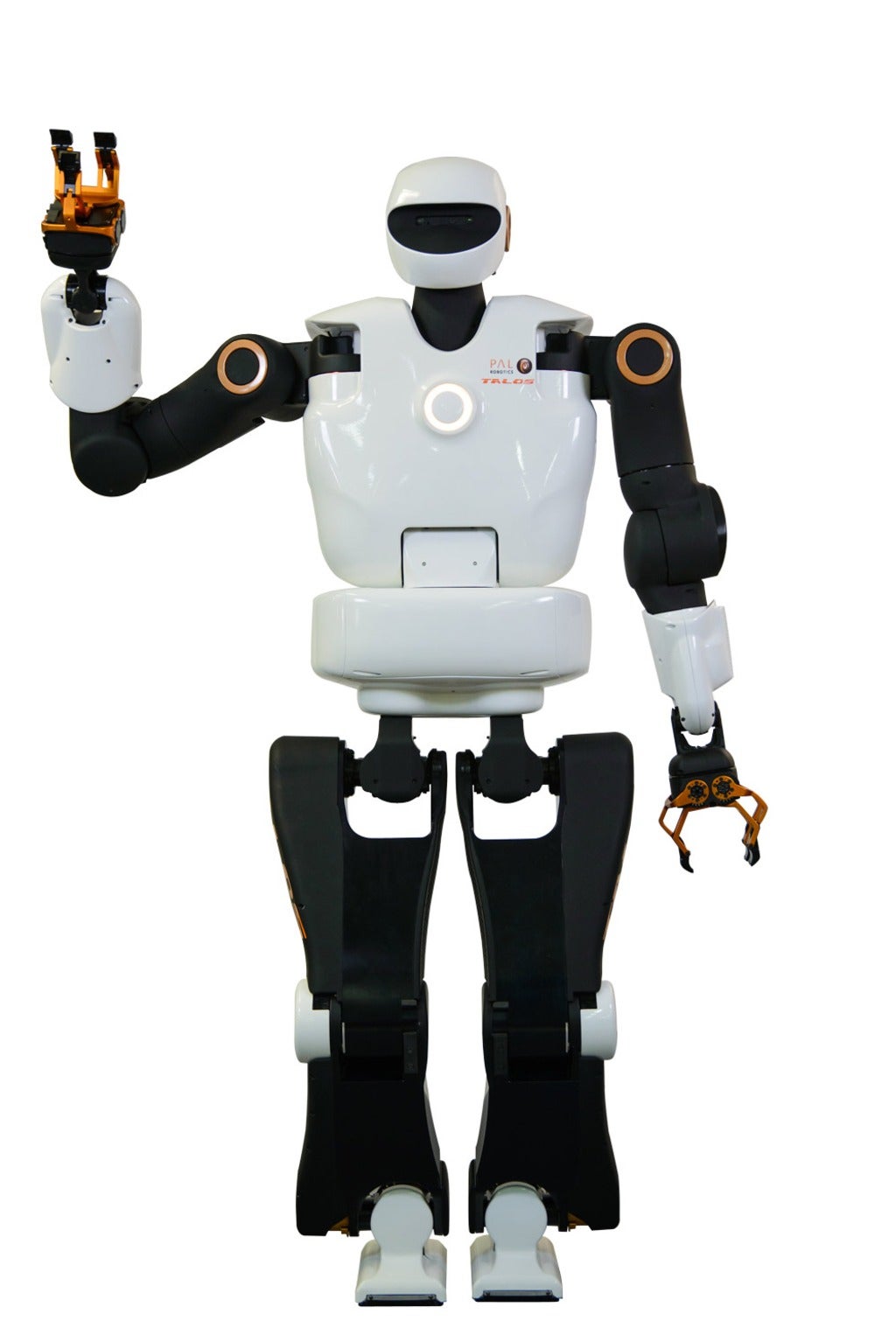
TALOS
Full-size humanoid robot from PAL Robotics. Includes torque sensing and control at all joints, force-torque sensing at wrists and ankles, and a large arm workspace with high payload limits.
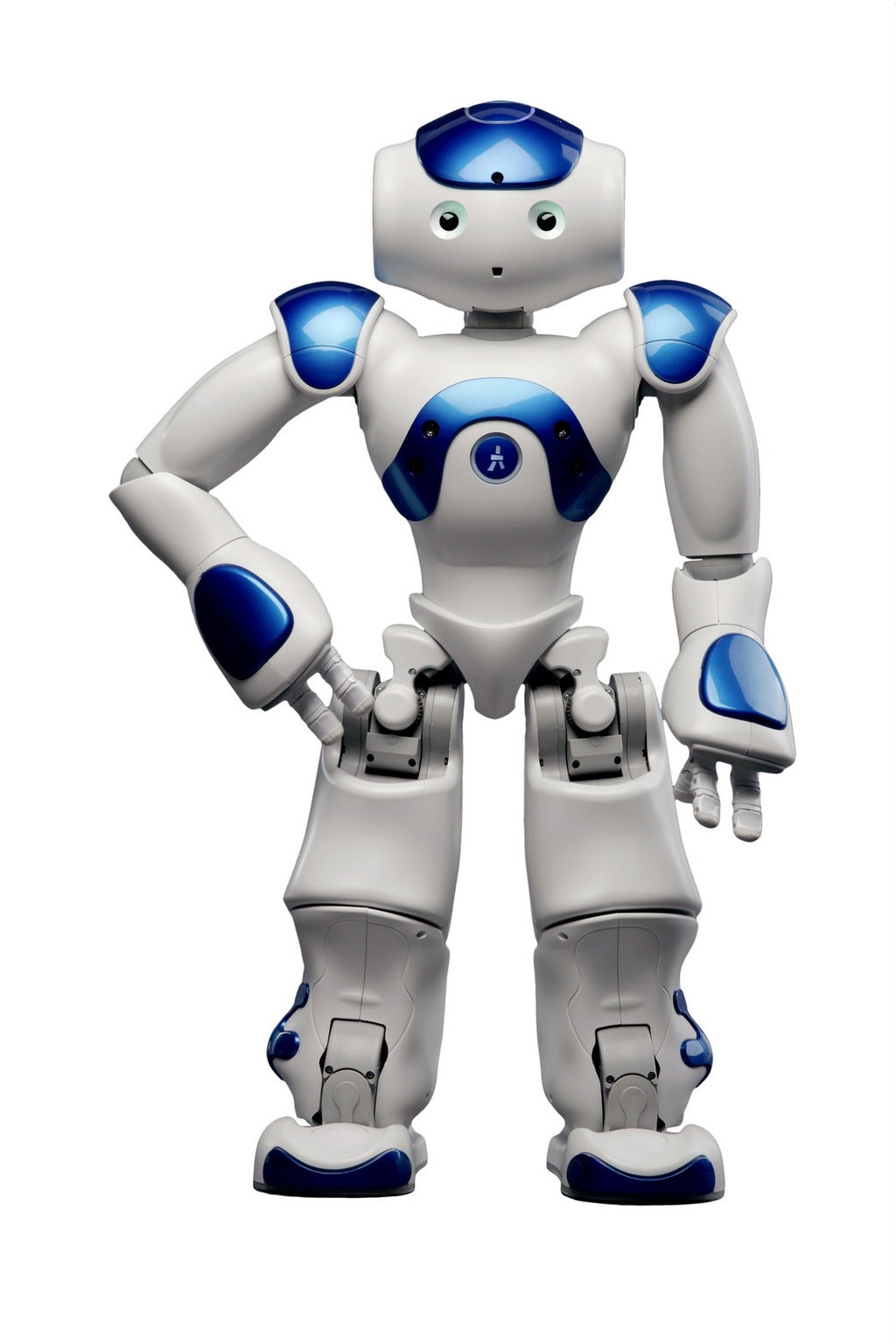
NAO
Small humanoid robot from Softbank Robotics. Includes directional microphones, dual cameras, text-to-speech, built-in natural language processing and image recognition, and a global user base.

MOVO
A dual-arm mobile manipulator from Kinova Robotics with a holonomic base and a raisable body. Includes a pair of JACO² arm mounts and a Kinect One on a pan-tilt mount.

Panda Powertool
Easy-to-use collaborative robotic arm from Franka Emika. Programmable via a touch interface which can learned in minutes, while sensitive enough to move lightweight parts safely near people.
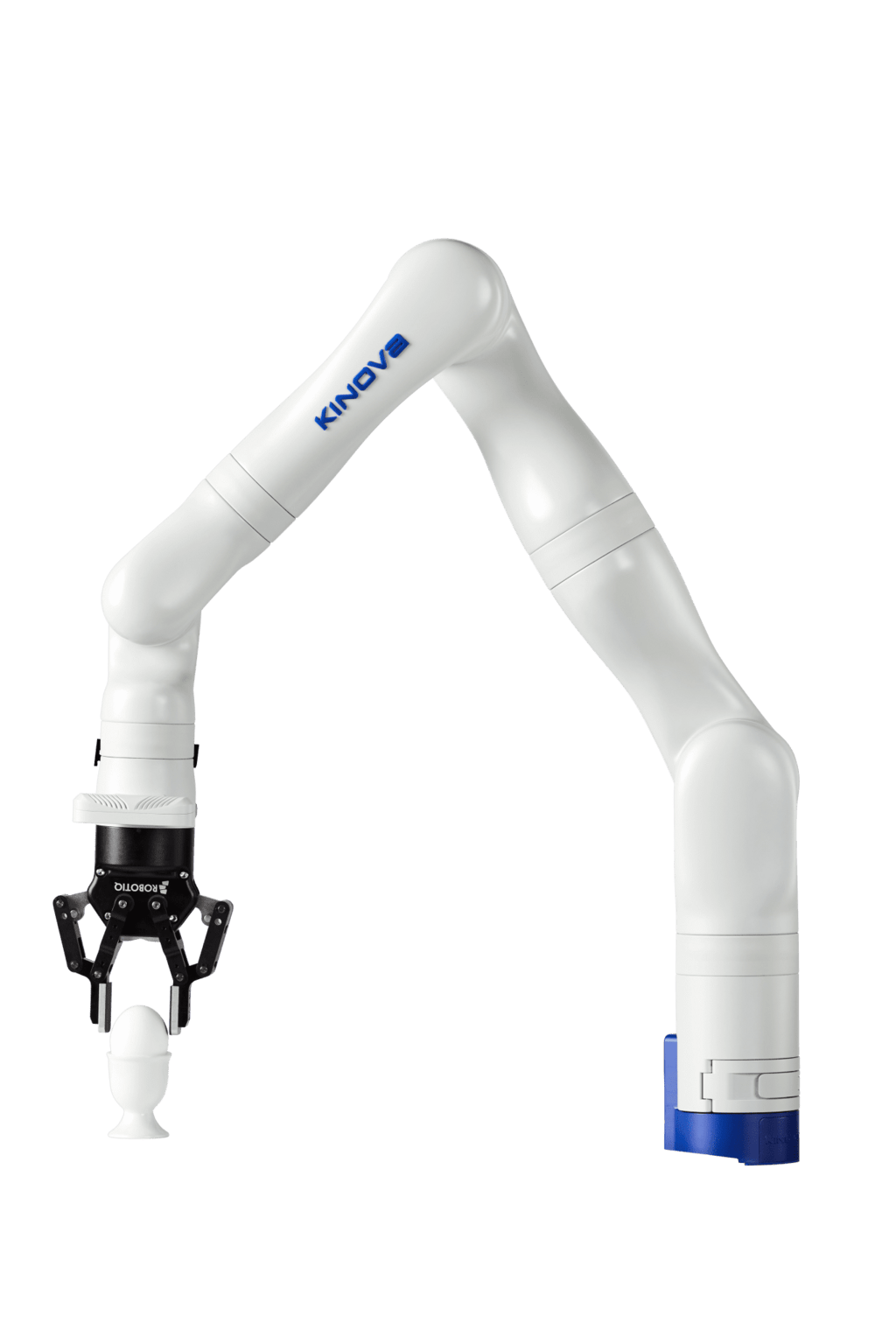
Gen3 Ultra Lightweight Arm
Ultra lightweight arm from Kinova Robotics with a user-friendly interface. Includes torque sensing in each of its seven arm joints, a video + depth camera at the wrist, and several infinite-rotation joints.

Warthog
Amphibious outdoor research platform from Clearpath Robotics. Includes rugged design and traction tires for all-terrain mobility and a modular payload bay with power and communication ports.

Ridgeback
Omnidirectional indoor research platform from Clearpath Robotics. Includes dual (front and rear) LIDAR, a precision holonomic drivetrain, passive suspension, and high-resolution encoders.

Husky
Outdoor research platform from Clearpath Robotics. Includes a large payload area with integrated power, a rugged design, a high-torque drivetrain, and a large user base.

Jackal
Small weatherproof research platform from Clearpath Robotics. This fast entry-level field robotics platform has an onboard computer, GPS, and IMU all integrated into a ROS environment.

QDrone
High-performance indoor quadrotor from Quanser. Its carbon-fibre frame holds an Intel Aero Compute Board with built-in WiFi and native support for the platform's RealSense and optical flow cameras.

Matrice 210 RTK
Large outdoor quadrotor from DJI. Includes an FPV camera, single or dual camera gimbals, stereo vision and laser sensors for obstacle detection, and precision outdoor localization using D-RTK GPS.