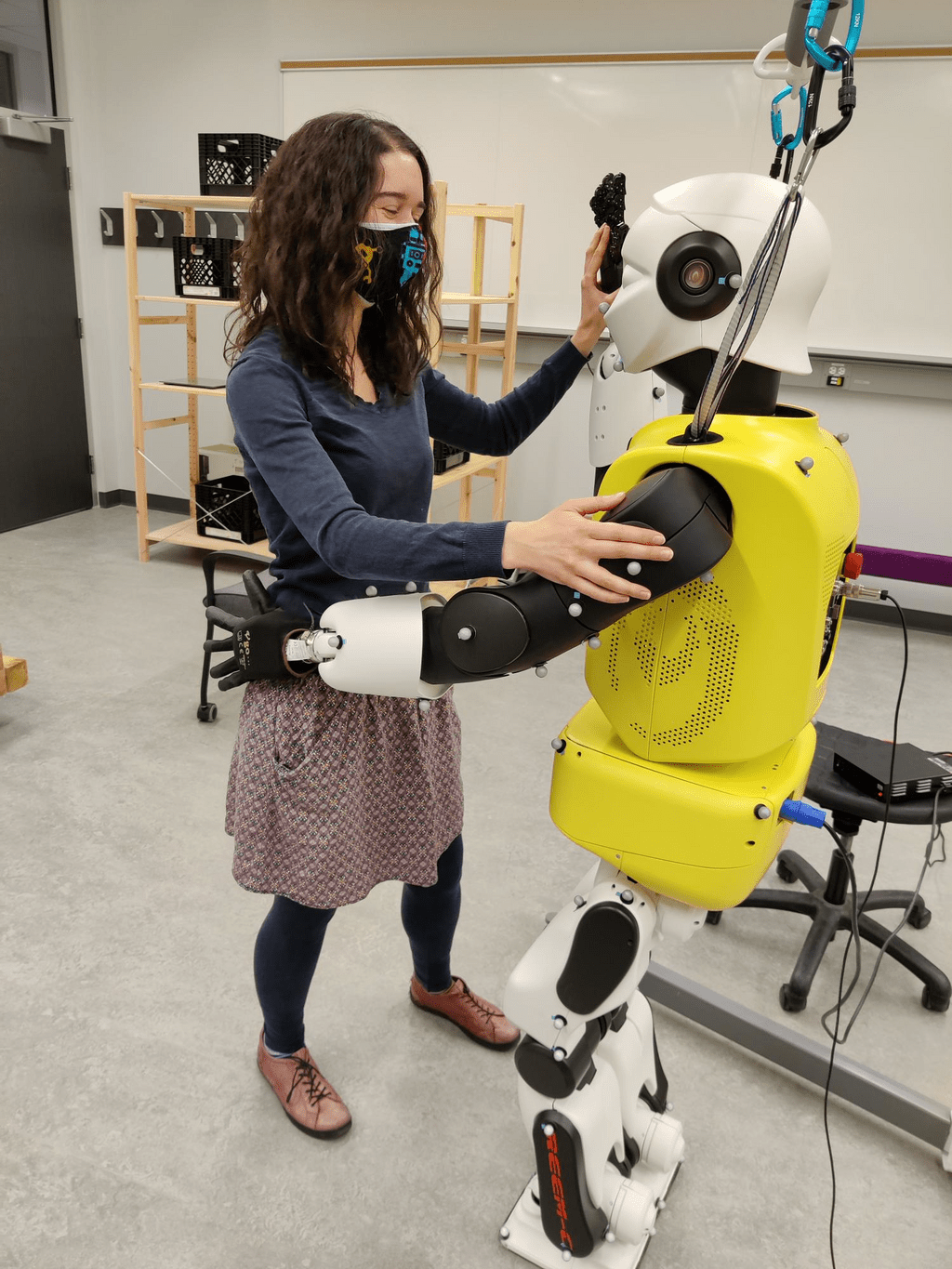
This project focuses on developing compliant control approaches for the position-controlled REEM-C which enable close, direct physical human-robot interactions that are also appropriate for social interactions.
This project focuses on developing compliant control approaches for the position-controlled REEM-C which enable close, direct physical human-robot interactions that are also appropriate for social interactions.
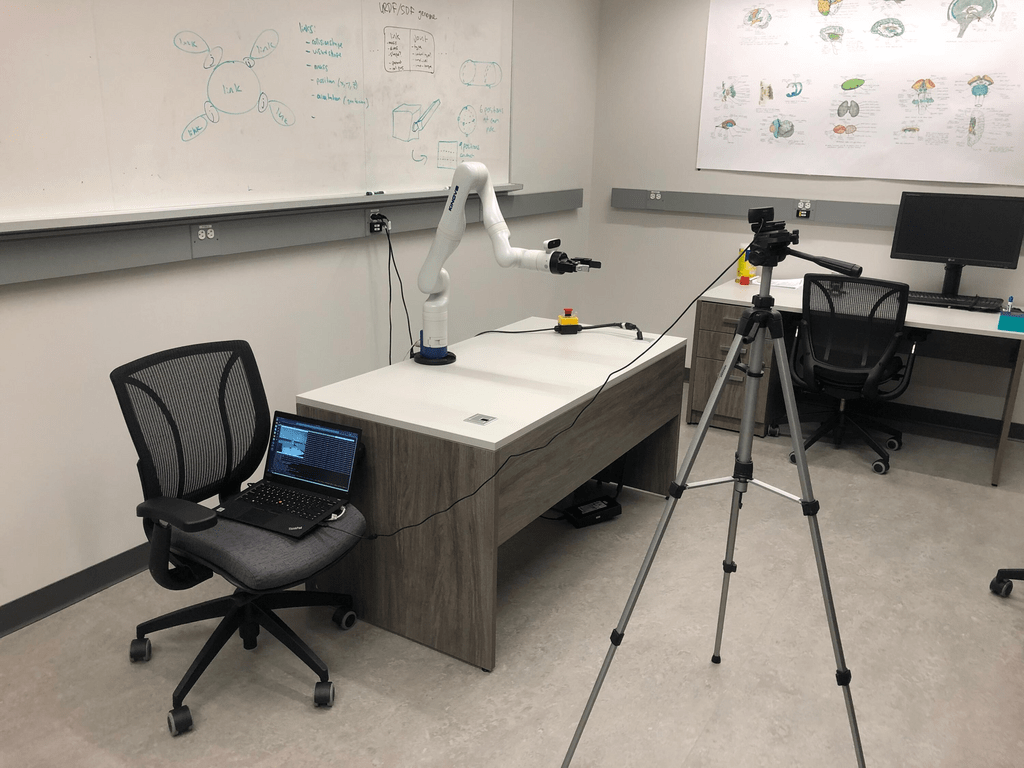
We train robots to solve general tasks using only images.
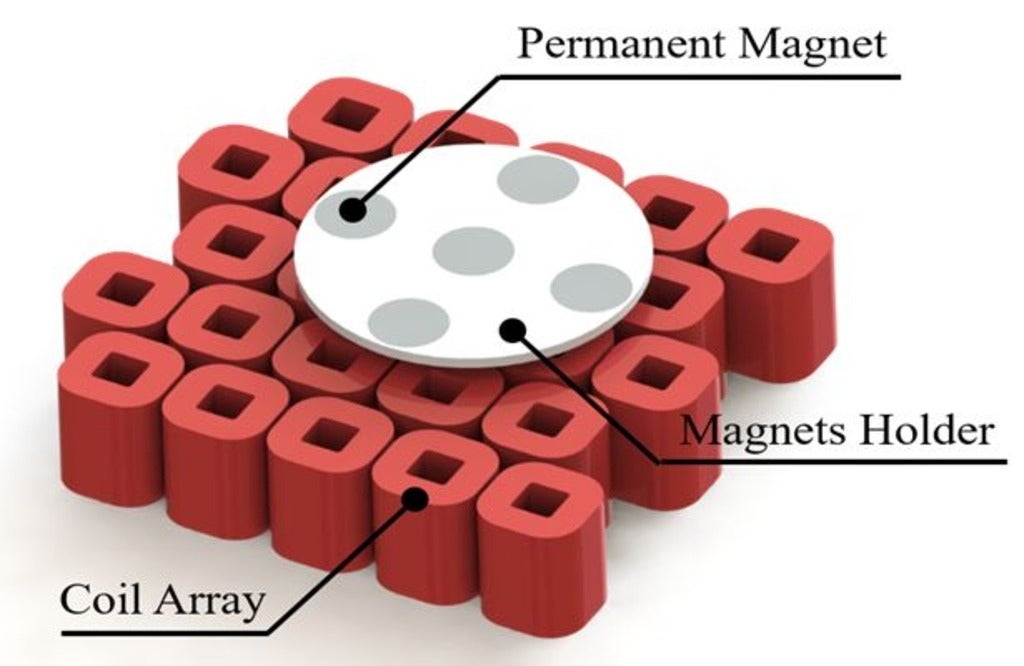
The goal of this project is to levitate a group of robots in 3D space using electromagnetic energy. MagLev (magnetically levitated) robots, providing frictionless motions and precise motion control, have promising potential applications in many fields. Controlling magnetic levitation systems is not an easy task; therefore, designing a robust controller is crucial for accurate manipulations in the 3D space and to allow the robots to reach any desired location smoothly.

The goal of this work is to develop methods and tools which will enable reliable dynamic balance and gait for bipedal robots. Currently, the focus of this project is on the development and application of methods for quantifying and measuring various kinematic and dynamic properties of the robot which are critical to dynamic bipedal gait and balance.
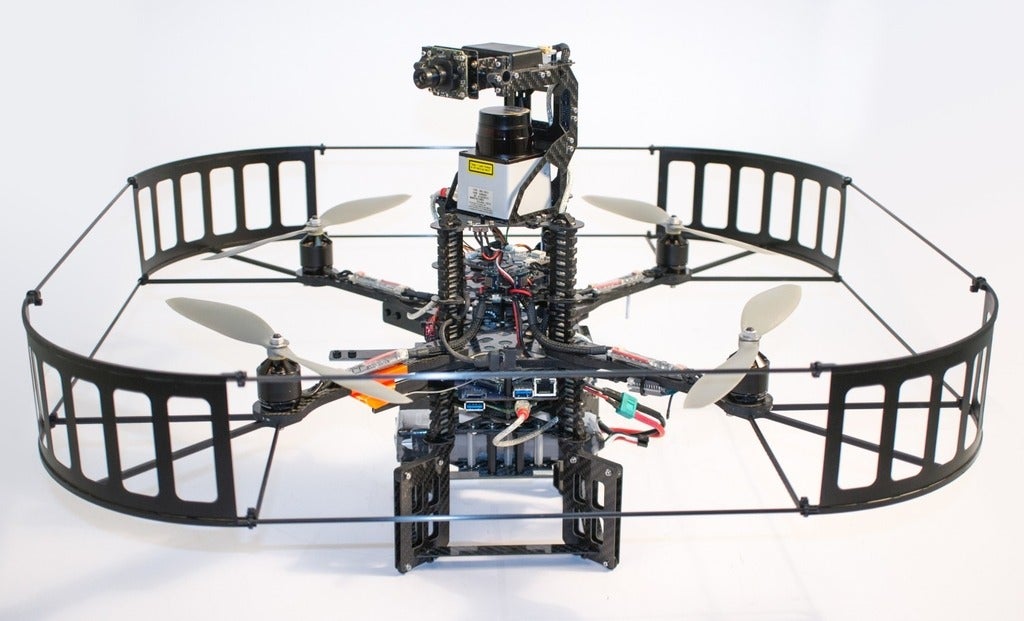
This work presents a path following controller for a quadrotor vehicle.

The main motivation for this project is to improve the model of dynamical systems, beyond the physics-based models, by incorporating measurements of the model o