If you would like to see more information on this case study, click here!
You can request this case study and a WCDE staff member will get back to you.
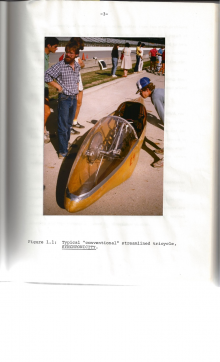 The International Human Powered Vehicle Association (IHPVA) was formed in 1976 to promote the development of innovative vehicle designs for land, water and air. They organized an annual International Human Powered Speed Championships (IHPSC) to provide a venue for racing with minimal restrictions on vehicle design, to promote innovation in HPV (Human Powered Vehicle) design. The IHPSC saw the introduction of a diverse range of land vehicles, especially recumbent bicycles and tricycles with aerodynamic fairings. By 1980, the world record for the flying 200 m sprint was held by a recumbent tricycle, the Vector, with a top speed of 94.77 kph. In December 1983, human powered land vehicles were the cover story in Scientific American. Figure 1 shows a typical streamlined tricycle, Synchronicity, which competed at the 1983 IHPSCs in Indianapolis. In 1982, the author had just commenced his MSc degree at Queen’s University in Kingston and was looking for a suitable thesis topic in the area of vehicle dynamics. He was intrigued by these human powered tricycles, but was more interested in road race circuits, where cornering ability was more important than aerodynamics. He felt that a leaning human powered tricycle could combine some aerodynamic advantages of the low recumbent configuration with the cornering ability of a bicycle. In consultation with his MSc supervisor, Ron Anderson, they decided to investigate this vehicle as his thesis research.
The International Human Powered Vehicle Association (IHPVA) was formed in 1976 to promote the development of innovative vehicle designs for land, water and air. They organized an annual International Human Powered Speed Championships (IHPSC) to provide a venue for racing with minimal restrictions on vehicle design, to promote innovation in HPV (Human Powered Vehicle) design. The IHPSC saw the introduction of a diverse range of land vehicles, especially recumbent bicycles and tricycles with aerodynamic fairings. By 1980, the world record for the flying 200 m sprint was held by a recumbent tricycle, the Vector, with a top speed of 94.77 kph. In December 1983, human powered land vehicles were the cover story in Scientific American. Figure 1 shows a typical streamlined tricycle, Synchronicity, which competed at the 1983 IHPSCs in Indianapolis. In 1982, the author had just commenced his MSc degree at Queen’s University in Kingston and was looking for a suitable thesis topic in the area of vehicle dynamics. He was intrigued by these human powered tricycles, but was more interested in road race circuits, where cornering ability was more important than aerodynamics. He felt that a leaning human powered tricycle could combine some aerodynamic advantages of the low recumbent configuration with the cornering ability of a bicycle. In consultation with his MSc supervisor, Ron Anderson, they decided to investigate this vehicle as his thesis research.
The author’s research involved the development of a potential vehicle concept along with a suitable mathematical model to examine vehicle stability and control in typical maneuvers to establish feasibility. Computer simulations were necessary to examine the behavior over a range of design parameters. Further analyses were then required to specify vehicle geometry.
The teaching objective of this case is to illustrate a systematic approach to the design of an innovative vehicle, with an emphasis on dynamic analyses. Emphasis is placed on the effective use of engineering analysis, including the generation of equations of motion, stability analyses, and simulation. The development of a simple driver control model is briefly described. This case is intended for use in ME321 (Kinematics and Dynamics of Machines) as an illustration of the design process, and the design of linkages. It will also cover topics in vibrations and simulations of multi-degree-of-freedom three-dimensional systems.




