
Collaborative assembly using a Panda Powertool robot

Diagram of the Human-Robot Interaction Framework

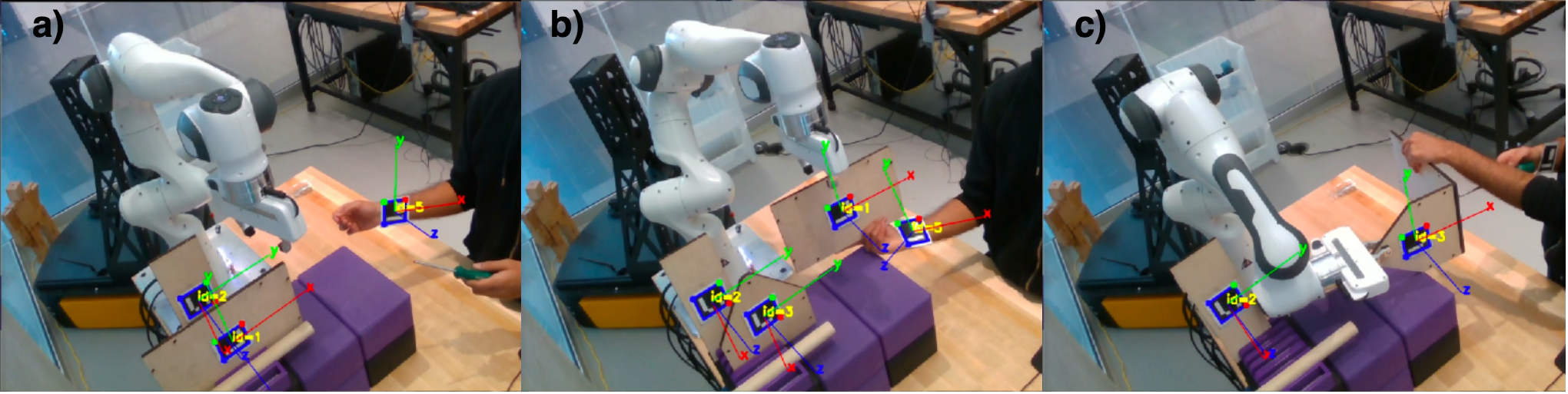
Example of collaborative assembly using Aruco markers

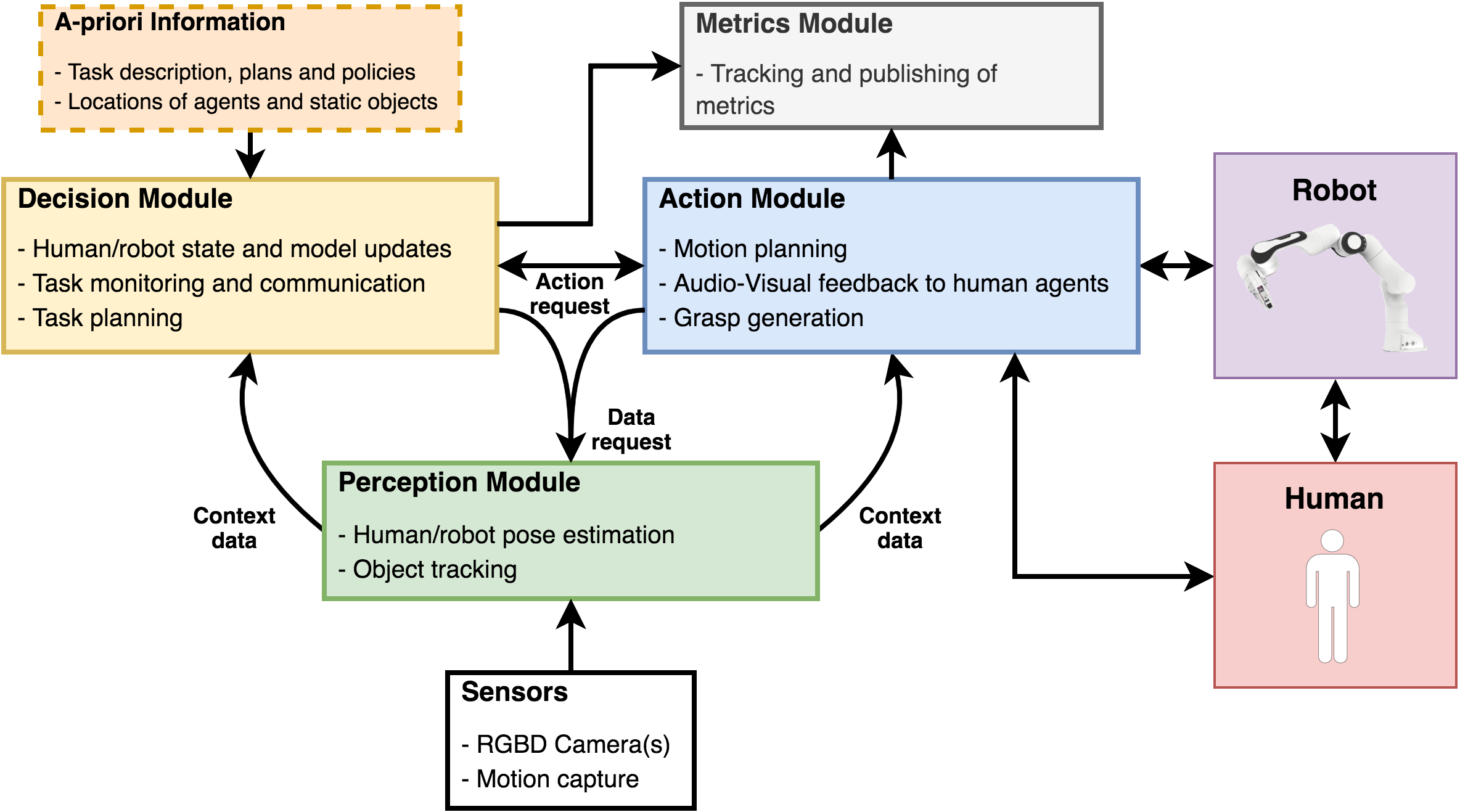
This work aims to ease the implementation and reproducibility of human-robot collaborative assembly user studies. A software framework based on ROS is being implemented with four key modules: perception, decision, action and metrics.
The perception module aggregates sensor data to be used by the decision module which is the task-level executive that breaks down the high-level goal into assignable subtasks. The action module takes subtask requests from the decision module and breaks them down into primitives for execution on the robot or delegates them to a human agent. The metrics module tracks quantitative metrics and publishes them at the end of the study.
The framework is being implemented with modular interfaces to allow for implementations of varying complexity within each module. To illustrate the framework, an initial study will be run to test how participants adapt to different motion planning implementations while assembling a toolbox with the Panda Powertool.