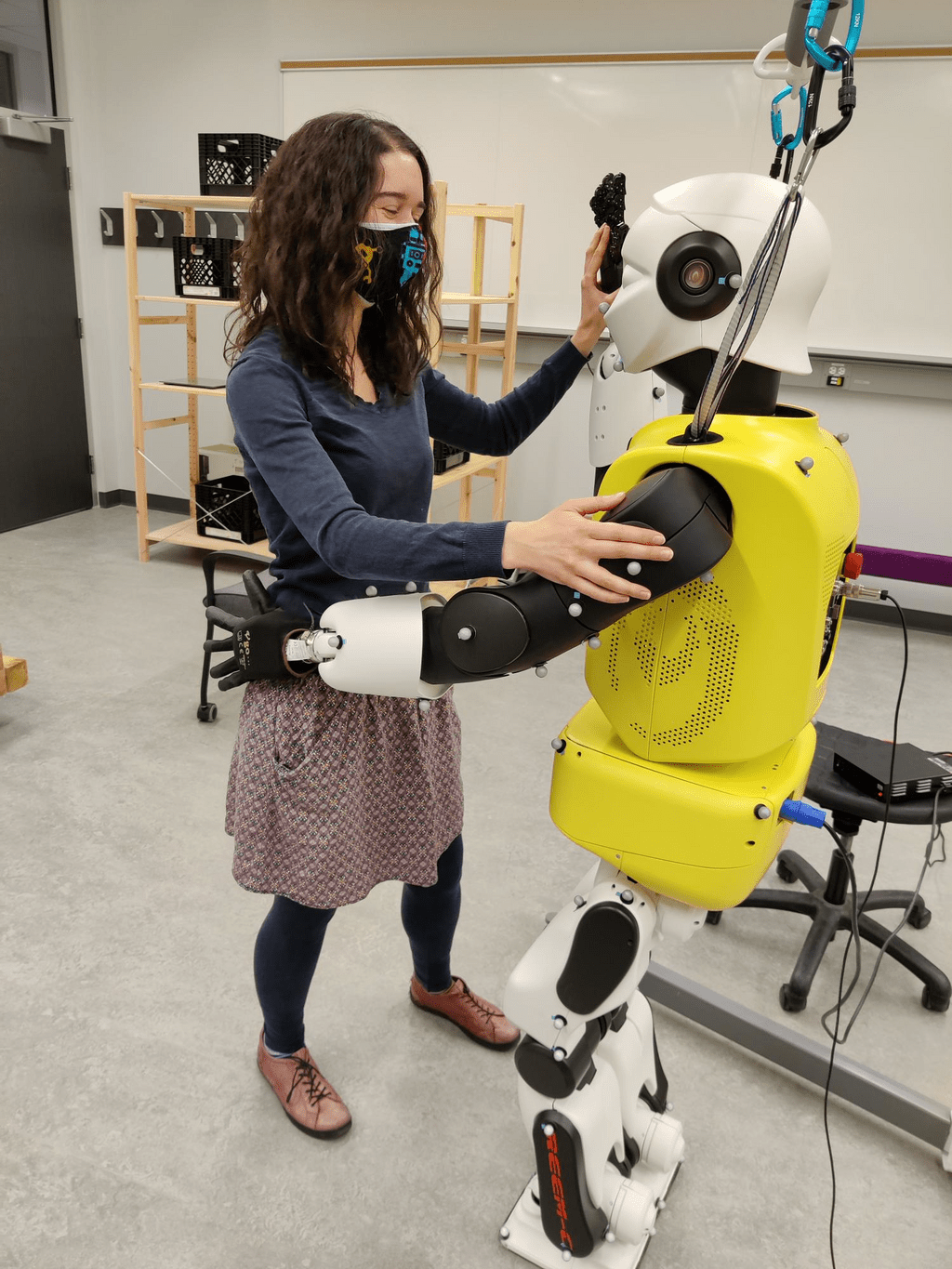
This project focuses on developing compliant control approaches for the position-controlled REEM-C which enable close, direct physical human-robot interactions that are also appropriate for social interactions.
This project focuses on developing compliant control approaches for the position-controlled REEM-C which enable close, direct physical human-robot interactions that are also appropriate for social interactions.

A research project led by PhD student Brok Laschowski focuses on developing deep learning models for visual intelligence, modelling the visual information processing neural networks in the brain. These brain-inspired algorithms are used for autonomous robot control and decision-making.

This project aims to detect and classify physical interaction between a human and the robot, and the human's intent behind this interaction.

This work aims to ease the implementation and reproducibility of human-robot collaborative assembly user studies.

This project brings together several novel components to help solve the problem of multi-camera SLAM with non-overlapping fields of view to generate relative po

Visual navigation algorithms pose many difficult challenges which must be overcome in order to achieve mass deployment.
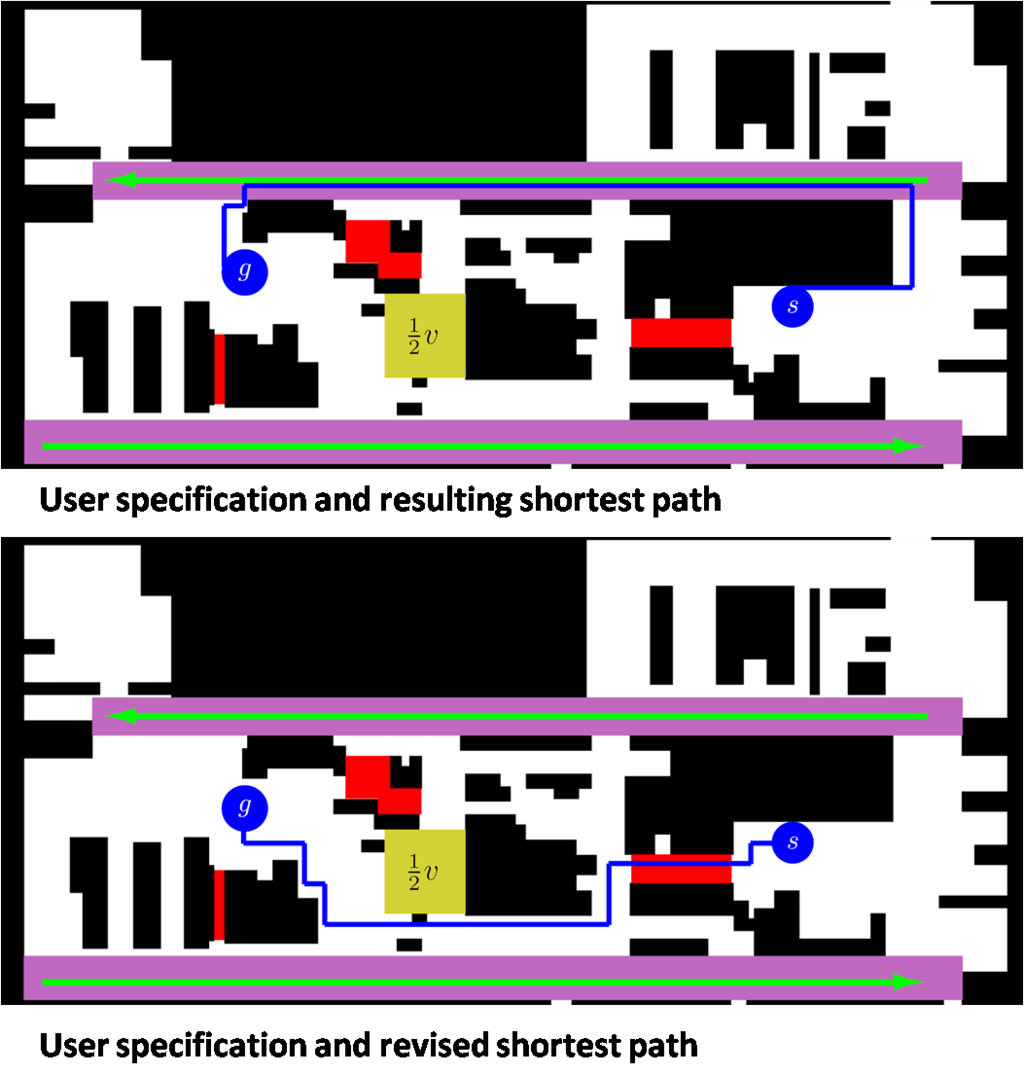
While autonomous robots are finding increasingly widespread application, specifying robot tasks usually requires a high level of expertise. In this work, the focus is on enabling a broader range of users to direct autonomous robots by designing human-robot interfaces that allow non-expert users to set up complex task specifications. To achieve this, we investigate how user preferences can be learned through human-robot interaction (HRI).

The goal of this work is to develop methods and tools which will enable reliable dynamic balance and gait for bipedal robots. Currently, the focus of this project is on the development and application of methods for quantifying and measuring various kinematic and dynamic properties of the robot which are critical to dynamic bipedal gait and balance.
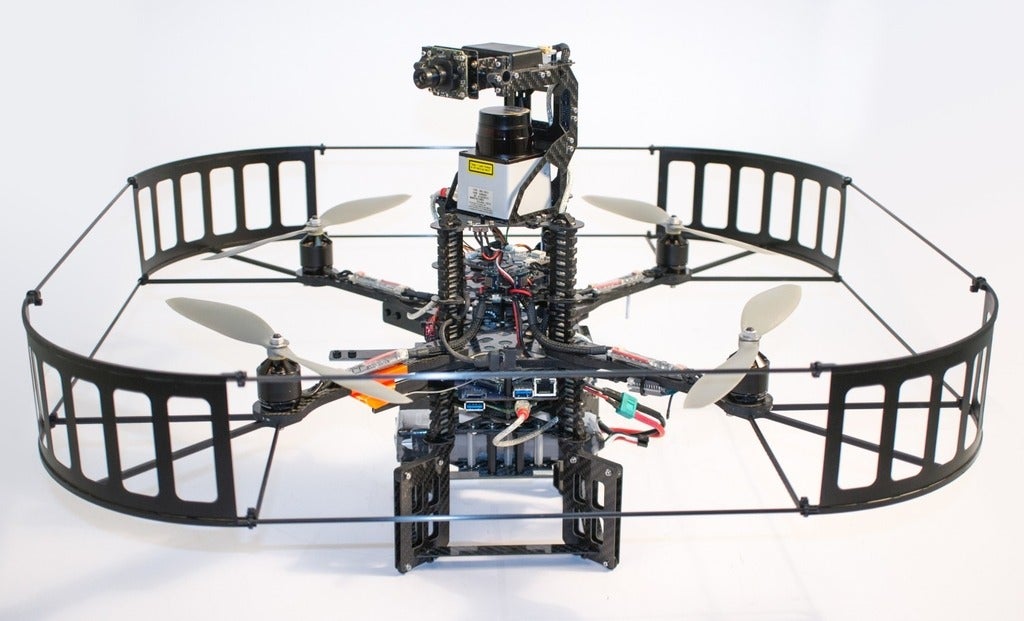
This work presents a path following controller for a quadrotor vehicle.

The main motivation for this project is to improve the model of dynamical systems, beyond the physics-based models, by incorporating measurements of the model o