Non-Overlapping Field of View Multicamera Cluster SLAM
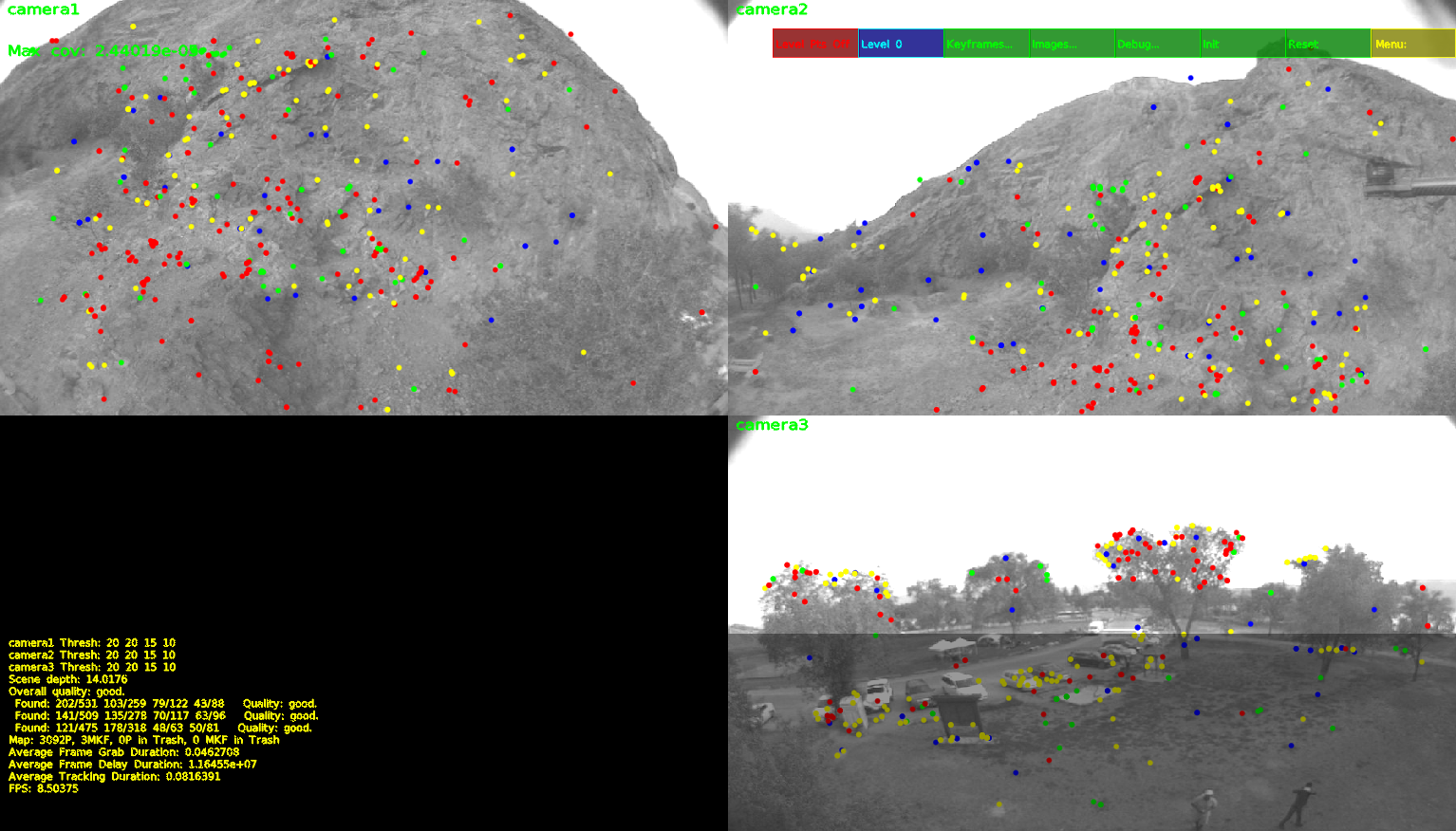
This project brings together several novel components to help solve the problem of multi-camera SLAM with non-overlapping fields of view to generate relative pose estimation data. This includes the Multi-Camera Parallel Tracking and Mapping (MCPTAM) algorithm, as well as novel approaches to dealing with scale recovery and reducing degenerate motions for multi-camera SLAM.