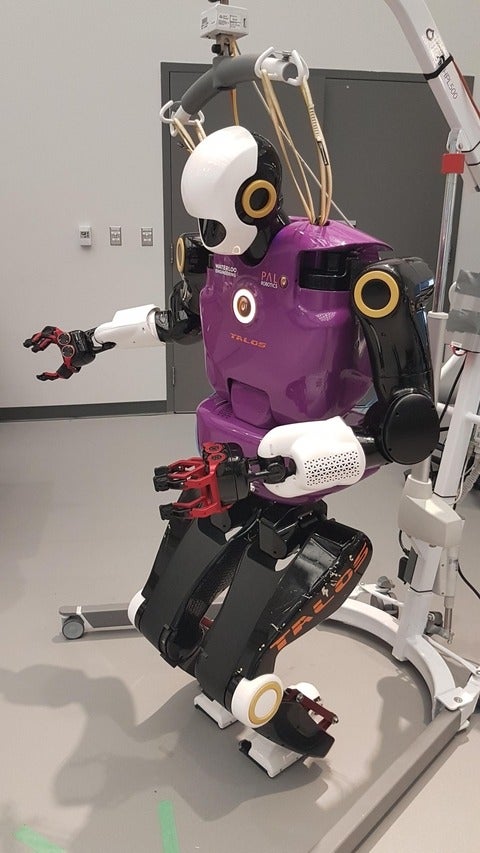
This project aims to detect and classify physical interaction between a human and the robot, and the human's intent behind this interaction.
This project aims to detect and classify physical interaction between a human and the robot, and the human's intent behind this interaction.

This work aims to ease the implementation and reproducibility of human-robot collaborative assembly user studies.
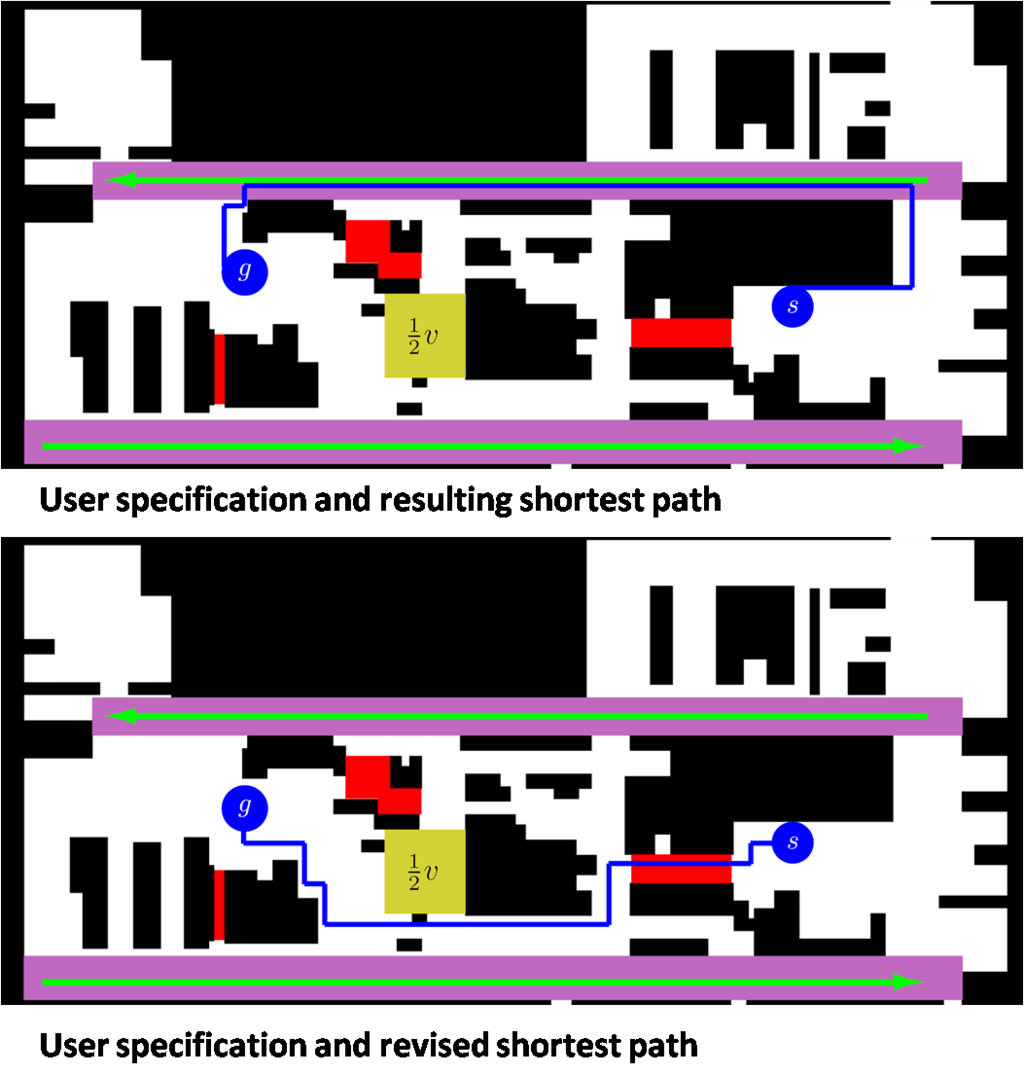
While autonomous robots are finding increasingly widespread application, specifying robot tasks usually requires a high level of expertise. In this work, the focus is on enabling a broader range of users to direct autonomous robots by designing human-robot interfaces that allow non-expert users to set up complex task specifications. To achieve this, we investigate how user preferences can be learned through human-robot interaction (HRI).