Design team members: Simon Booth & Jon Secord
Supervisor: Dr. David Clausi
Background
The researchers of the University of Calgary's Geomatics Engineering department are investigating the accuracy of Magnetic Resonance Imaging (MRI) as a tool in computer assisted spinal surgery. The current technology used in orthopaedic surgery is based on an X-ray model of the spine for pre-operative planning. This requires that the patient be exposed to a significant level of radiation. Two radiation-free alternatives for modelling the skeletal system include MRI and digital photography. The Calgary team intends to perform a detailed error analysis between the three imaging modalities. Our contribution will be the formation of the MRI spinal model. The ultimate vision for the shared project is a spinal modelling system for computer-assisted spinal surgery using MRI that provides the accuracy required for operative success without the substantial patient radiation dose characteristic of current X-ray systems.
Project description
The goal of our workshop is the development of an automated computer algorithm for segmenting the spinal vertebrae from axial MR images and constructing a 3-D model of the patient's spine. Due to the weak response of bone in MRI, the contrast between bone and soft tissue is poor. Successful segmentation will require pre-processing of the digital images to improve contrast and enhance edges as well as an iterative curve-fitting algorithm.
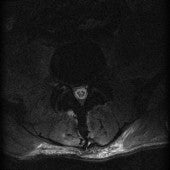
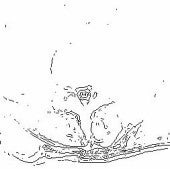
Figure 1: A Typical MRI Slice and Results of Sobel Edge Detection
Design methodology
It is evident from the images above that simple filtering and edge detection are insufficient for segmenting the vertebrae. The design has been cycled through increasing levels of complexity. Currently, we have developed a multi-stage algorithm that outputs the centre location and rotation of the vertebra in each slice. This information will later be used to match the data to a generic spinal map for iterative edge detection.