Design team members: Prasun Chaudhuri, Tao Sang
Supervisors: Dr. John McPhee, Chad Schmitke
Background
In recent years, there has been an increasing amount of research conducted in the field of walking robots. One of the most common applications of autonomous walking robots is navigation in areas where the terrain is too uneven to be accessed by wheeled vehicles. In such areas, walking robots can be used to collect data that would otherwise be difficult to obtain.
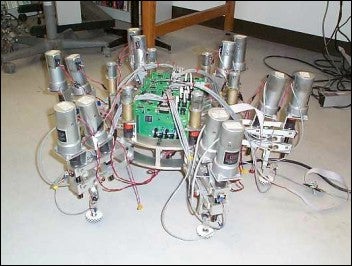
In the fall of 1996, a few fourth year students at the University of Waterloo started a project called Hexotica. From Hexotica, it was hoped that a fully functioning walking robot might be constructed and available for use by future students at the university. Unfortunately, the robot, which was designed, included a few major design flaws that limited its abilities.
In 1998, the redesign process started from fresh. In addition to the mechanical modifications, the entire logical units of the robot were reconstructed. By the start of the winter term of 2001, a six-legged walking robot, named Hexplorer, was essentially through its design phase and had reached the integration stage.
Project description
The objective of this group is, to realise by Spring 2002, a functional, walking robot equipped with a reliable and stable development platform for future research. In other words, by the end of this project course, Hexplorer should be able to execute a few walking algorithms. At the moment the Hexplorer is at a point where all the mechanical and electrical components have been integrated and rudimentary software has been implemented that allows the Hexplorer to perform basic movements. However, the control software is in a rudimentary stage and is not very robust or reliable at the moment. In order to achieve the objective stated above, there are several key issues that need to be addressed and several milestones that have to be achieved along the way. In point forms, they are:
Design methodology
Right now, the existing software architecture has been fully examined. Most of the existing parts are meeting the requirement of supporting the control architecture of Hexplorer. The limit switches has been changed from being polled by the brain to interruption. And minor changes were made on CAN communication.
Using systems design methodology, a system analysis was done on the input, output, and requirements of the Diagnostic Board. It is followed by the design of the diagnostic board before it is being drawn and layout using OR-CAD. Finally, it is sent to be printed.
So far, the design stage of the diagnostic board has been completed. However, because of some difficulties with component selection on the diagnostic board, it is still at the OR-CAD drawing stage. The diagnostic board is scheduled to be ready before Christmas.
It is hoped to have some simple walking algorithms tested on Hexplorer before Christmas. But most of the Command Interface and Walking will be done after the new year.