
Supervisor: Mohammed Hamed El-Abd
As Systems Design Engineers, we believe that it is critically important throughout our university education to have a technical project which incorporates a challenging breadth of engineering skills. Our project involves designing an autonomous robot to compete in an international firefighting robotics competition at Trinity College in Hartford Connecticut.
Background
-
Trinity College Fire Fighting attracts over 100 teams from around the world to compete each year in a contest to navigate a simulated household and extinguish a small flame.
-
Household fires cause thousands of deaths and injuries each year.
-
In a household fire, small-scale robots can explore areas dangerous for humans due to clutter, debris, or air quality.
-
The Trinity College competition simulates a maze with hallways, rooms, stairs, random obstacles and a fire source. Although the environment is simplified, the rules and scoring are carefully designed to reward strategies that can effectively be applied to real world situations.
Project description
The design of an autonomous robot involves mechanical design, programming an algorithm and creating a wireless communication interface between the onboard controller and a remote computer.
Navigation
The robot makes use of on board sensors to detect walls, corners, rooms and ramps. As the robot navigates the maze is searches for rooms, ultimately locating the fire source as performing a search and rescue on a simulated baby. The robot must also avoid obstacles in the arena and traverse from one level to another.
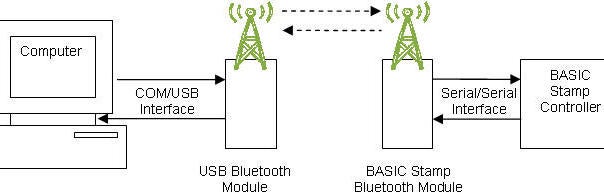
Wireless communication
Our design uses a wireless Bluetooth module to connect the onboard controller to a remote computer which performs the higher level functions. The remote computer uses the MATLAB programming environment to make intelligent decision on maze navigation and search patterns.
Design methodology
We applied an iterative approach to the robot design, such that each iteration will yield a functioning robot that can be tested and refined before continuing to the next stage. This allows for extensive testing and continuous improvement throughout the entire development process.
-
Minimally functional robot
-
Basic sensing and navigating ability as directed by remote computer commands.
-
-
Autonomous robot
-
The robot and sensors function together to interpret the environment and navigate through it.
-
-
Competition robot phase I
-
The robot can operate in an environment with furniture and an uneven floor. At this stage, the robot begins to manipulate its surroundings and extinguish a fire.
-
-
Competition robot phase II
-
The robot is sound activated, can operate untethered, can detect a crying baby and navigate the two-level ramp maze.
-
Thanks for reading - hope you enjoyed our project.
Systems Design is a great program!