Design team members: Roanne Sones and Allan Colquhoun
Supervisor: Prof. Erik Kubica
Background
Volleyball is an appealing and challenging game. Although growing in popularity and improving in quality, it is very difficult to refine your skills without many players participating. For many elite athletes and teams, this is a concern.
Blocking in volleyball involves between one and three players of the opposing team jumping in unison to create a wall above the net with their hands. Ideally this wall will block the ball down to the court on the attackers side. An effective block is often the difference in a game, and successfully avoiding the block is a skill all players seek to improve.
Creating a mechanical blocking system for our fourth year project will allow players to develop the essential skill of spiking the ball around the block, without requiring the presence of other elite players to form the block. In team practice situations, players won’t be required to perform the blocking, allowing all players to practice their spiking skills at the same time, if so desired.
Having both spent significant amounts of time playing varsity volleyball, the problems noted above have been very apparent and often frustrating for us on a personal level. Given the chance to combine two activities (engineering and volleyball) to which we have dedicated so much of our time over the last five years and provide an improved training environment provided the motivation for this project.
The first step in this project is to determine the requirements to build a volleyball blocking system prototype that will improve the training for an advanced volleyball player. Having established these requirements, designs will be considered that will attempt to address them. The various potential designs will be evaluated against the requirements and a final design will be selected. The final stage of this project will be to completely design the selected design and attempt to build a fully functional prototype.
Project description
At this point in time, we are working on fully designing our selected, final prototype design. The following describes some of the major components of the system, the alternatives considered for each, and a description of the final design.
One of the first steps we took to begin considering possible designs was to establish major components of the system. The major components consisted of: the blocking surface, the control system, the mechanical system and the anchoring system.
Blocking
Surface
The
blocking
surface
is
the
component
of
the
system
that
will
be
above
the
net
and
will
‘block’
the
ball
attacked
by
the
spiker.
It
was
important
to
develop
a
blocking
surface
that
reflects
the
ball
realistically,
that
won’t
be
broken,
and
was
light
enough
to
dynamically
move.
Eliminating
heavy
materials
such
as
wood
and
metal,
we
were
left
with
lexan
and
acrylic.
Performing
stress
analysis
and
investigating
the
reflection
properties
of
lexan
and
acrylic,
it
was
determined
that
the
blocking
surface
would
be
made
of
lexan.
Control
System
The
control
system
provides
the
system
the
intelligence
it
needs
to
accomplish
the
dynamic
aspects
of
its
requirements.
Responding
to
inputs
and
triggering
outputs
were
to
be
handled
by
a
PC,
a
micro
controller,
a
PLC
or
simply
a
series
of
switches.
At
this
point,
a
final
control
system
hasn’t
been
selected.
However,
a
PC
is
unlikely
due
to
cost
and
difficulty
of
I/O,
and
a
series
of
switches
is
unlikely
due
to
the
limited
control
offered.
Mechanical
system
The
portion
of
the
system
involved
in
moving
was
dubbed
the
mechanical
system.
There
were
two
main
options
that
were
considered
for
the
mechanical
system.
The
first
consisted
of
pneumatic
cylinders
being
attached
to
the
blocking
surface.
When
the
compressed
air
source
provided
pressurized
air
to
the
cylinder,
the
blocking
surface
would
be
raised
into
blocking
position.
There
could
be
up
to
three
cylinders,
each
controlling
one
blocking
surface.
The
other
option
was
to
use
a
pulley
system
using
motors.
Stepper
motors,
AC,
DC
and
Universal
motors
are
all
options
for
a
motor-based
solution.
Due
to
cost,
pneumatic
cylinders
have
been
eliminated.
The
type
of
motor
has
not
yet
been
established,
as
cost/benefit
analysis
for
the
various
types
is
ongoing.
Anchoring
System
The
final
major
component
was
the
anchoring
system.
This
provided
the
means
by
which
the
system
would
remain
stationary
during
the
impact
of
the
spike.
Two
approaches
were
considered,
attaching
the
anchoring
system
to
the
pole
system,
and
having
a
freestanding
anchoring
system.
Market
research
revealed
that
one
type
of
pole
dominated
the
market,
with
one
other
type
having
some
market
share.
However,
the
ease
installation
and
removal,
the
flexibility
and
the
safety
concerns
led
us
to
select
a
freestanding
anchoring
system.
Selected design
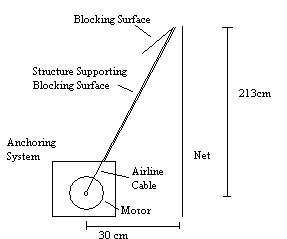
Although we arrived at our final design through the methodology described below, the discussion of the major system components provides good insight into the final, selected design. The final design is a motor-based design that will be anchored via a freestanding base. This base will house both the motors and the control system, when selected. The blocking surface will be raised into place by a pulley system and the structure will be clipped to the net at the top of the net to ensure the system will be able to withstand the force of a volleyball spike. A simple diagram of the system can be seen below in Figure 1.
Design Methodology
After numerous brainstorming sessions, the group finally settled on seven distinct prototype designs. The immediate goal at this stage of the design process was to determine what prototype should be selected for development.
In order to select only one prototype for development, we needed to come up with a set of criteria to evaluate the prototypes. The criteria selected were representative of high-level design requirements and were used to easily differentiate between the different prototypes. Table 1 details the selection criteria and the average metric in the unit of measurement of the criteria as determined by the group.
| Selection Criteria | Average Metric |
|---|---|
| Cost | Less then $300 |
| Ease of manufacture | Can be completed in 4 months |
| Ability to reflect the volleyball | Will accurately reflect the volleyball |
| Ability to simulate double block | Can create a single, double, cross and line block |
| Power requirements of system | Will require only an AC source to run |
| Ease of replacement components | Cost and location of replacement products |
| Portability | Can be carried by one person |
Table 1: Selection and average metric used as reference for different prototypes
With our selection criteria determined we then chose to set up a concept-screening matrix. Each prototype was deemed above average, average or below average for selection criteria in Table 1. This ultimately eliminated two prototypes that were below average on almost all aspects of the selection criteria.
The field was now narrowed down to only five prototypes. To select the final prototype for development a concept-scoring matrix was created. This primary purpose of this matrix was to take the priority levels of the selection criteria into account. The different priority levels were given associated weights that were used to consider the overall ranking of each prototype. Due to the nature of the project, the group decided to place a weight of 25% to both cost and ease of manufacture. As the project is only 8 months in duration, and we are still paying tuition, these are the limiting factors to our success.
Although a fairly close result, in the end Prototype 7 proved to most favourably meet the selection criteria.